
Page 7 - 2022年第53卷第6期
P. 7
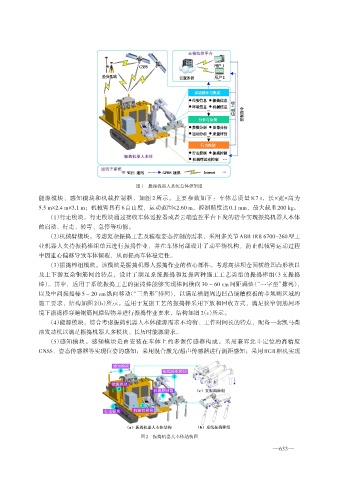
图1 振捣机器人系统总体框架图
能源模块、感知模块和机载控制器,如图 2 所示。主要参数如下:车体总质量 8.7 t,长×宽×高为
5.5 m×2.4 m×3.1 m;机械臂具有6自由度,运动范围≤2.60 m,控制精度达0.1 mm,最大载重200 kg。
(1)行走模块。行走模块通过接收车体遥控器或者云端监控平台下发的指令实现振捣机器人本体
的启动、行走、转弯、急停等功能。
(2)机械臂模块。考虑复杂振捣工艺及精准姿态控制的需求,采用多关节ABB IRB 6700-260型工
业机器人夹持振捣棒组单元进行振捣作业,并在车体尾部设计了动平衡机构,防止机械臂运动过程
中因重心偏移导致车体倾覆,从而提高车体稳定性。
(3)振捣棒组模块。该模块是振捣机器人振捣作业的核心部件。考虑高拱坝仓面横缝凹凸形状以
及上下游复杂钢筋网的特点,设计了满足系统振捣和复振两种施工工艺类型的振捣棒组(3 支振捣
棒)。其中,适用于系统振捣工艺的振捣棒能够实现棒间横向 30 ~ 60 cm 间距调整(“一字型”排列),
以及中间振捣棒 5 ~ 20 cm 纵向移动(“三角形”排列),以满足横缝周边凹凸键槽模板的非规则区域的
施工要求,结构如图 2(b)所示。适用于复振工艺的振捣棒采用下放和回收方式,满足狭窄钢筋网环
境下振捣棒穿越钢筋网障碍物并进行振捣作业要求,结构如图2(c)所示。
(4)能源模块。综合考虑振捣机器人本体能源需求不均衡、工作时间长的特点,配备一套凯马柴
油发动机以满足振捣机器人多模块、长历时能源需求。
(5)感知模块。感知模块是由安装在车体上的多源传感器构成。采用兼容北斗定位的高精度
GNSS、姿态传感器等实现位姿的感知;采用混合激光/超声传感器进行测距感知;采用RGB相机实现
图2 振捣机器人本体结构图
—633 —