
Page 9 - 2022年第53卷第6期
P. 9
C
式中:l mw 、l mb 、l h 分别为振捣棒L点位于坐标系{ }下C-X 、C-Y 、C-Z 方向的投影距离;l kw 为中间振
C
C
C
捣棒在X 方向的移动距离。其中,l mb 和l kw 变化范围分别是[30,60]和[5,20],cm。式(2)—(5)代入式
C
O
(1)中,求得振捣点空间坐标。同理,若已知振捣作业点位于坐标系{ }下的坐标,可通过矩阵逆运
B
算求得振捣点在机械臂基坐标系{ }下的位置,从而进行轨迹规划、运动分析等。
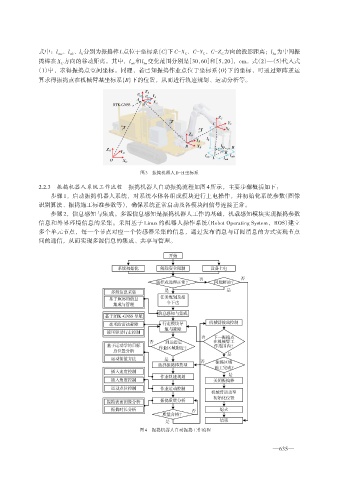
图3 振捣机器人D-H坐标系
2.2.3 振捣机器人系统工作流程 振捣机器人自动振捣流程如图4所示,主要步骤概括如下:
步骤 1,启动振捣机器人系统,对系统本体各组成模块进行上电操作,并初始化系统参数(图像
识别算法、振捣施工标准参数等),确保系统正常启动及各模块间信号连接正常。
步骤 2,信息感知与集成。多源信息感知是振捣机器人工作的基础,机载感知模块实现振捣参数
信息和外界环境信息的采集。采用基于 Linux 的机器人操作系统(Robot Operating System,ROS)建立
多个单元节点,每一个节点对应一个传感器采集的信息,通过发布消息与订阅消息的方式实现节点
间的通信,从而实现多源信息的集成、共享与管理。
图4 振捣机器人自动振捣工作流程
—635 —