
Page 28 - 2021年第52卷第7期
P. 28
水区管道的反射模式有了初步认识。Hyun 等 [11] 在实验室建立了缩尺模型来模拟管道泄漏,通过探地
雷达初步识别了泄漏前后雷达图像的不同特征。Crocco 等 [12] 最早采用了微波层析的方法对管道泄漏
进行了反演分析。David 等 [13] 对探地雷达图像特征提取的可行性进行了研究,提出了一种基于多智能
体系统的特征提取方法,使用密集矩阵处理 GPR 输出的预处理图像,并对初始数据进行分类,实现
塑料管道的自动定位,之后他们的研究认为对雷达原始数据的预处理非常重要,这不仅有利于对雷
达图像特征的获取,还有利于对泄漏类型的自动处理分类 [14] 。Lai 等 [15-16] 在实验室里模拟管道泄漏,
绘制了 PVC 管道泄漏引起探地雷达图像信号的不同扰动模式,包括反射和吸收机制,并用于识别
PVC 管道的现场漏水。此外,一些学者针对泄漏雷达波图像的辨识,研究应用了不同的算法和滤波
器 [17-18] 对图像进行处理,帮助检测和定位地下管线和特定的漏损工况,以实现管道和泄漏特征的可视
化,如 Silvia J.等 [19] 采用二阶方差滤波器来突出管道和漏水等感兴趣的特征,并根据特征提取结果开
发了 3D 模型对泄漏状况作进一步解释。
总体来说,目前国内利用探地雷达对土壤含水率探测的研究较多,但对探测管道泄漏的研究
还处于起步阶段,基本停留在正态模拟,或是对管道本身的探测研究,不足是缺乏仪器设备研发
和对漏水的现象、机理与反馈图像的比对,也没有相应的试验平台手段。国外在这方面的机理研
究走在前列,但在以下方面也有较大不足。一是现有针对供水管道模型试验采用封闭的塑料或者
木质的箱体,底板没有下渗,与现实埋地管道不符,这种情况下雷达反射波真实信号会被底板壁
等干扰;二是一些学者的室内实验比尺小 [15-16] ,埋深浅(如 100 mm),这与实际输水管道埋深差距
较 大 , 同 时 未 进 行 泄 漏 沙 土 分 层 采 样 对 比 试 验 ; 三 是 正 在 泄 漏 和 检 测 停 水 泄 漏 后 的 状 态 区 别 较
大,因为泄漏后随着时间推移,水会进一步下渗,泄漏后和正在泄漏带来的雷达反射波差异须区
别对待。
鉴于此,本文首先给出了探地雷达检测泄漏的原理,搭建更接近真实埋地输水管道状态的实验
室管道漏损雷达检测试验平台,首次开展系统的输水管漏水检测试验,并详细对比研究泄漏后、泄
漏时等工况下雷达回波图像的异同,目的是为解析漏水现象和雷达检测机理提供支撑,并为研发漏
损探地雷达检测设备和软件提供参考。
2 探地雷达检测原理及设备
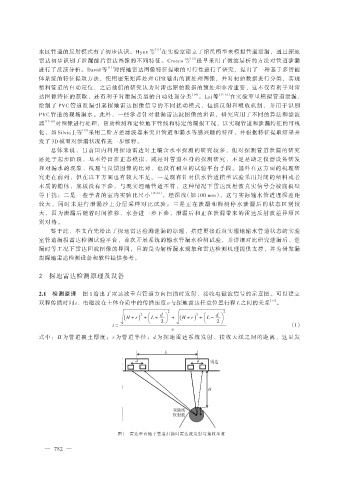
2.1 检测原理 图 1 给出了雷达波垂直管道方向扫描时发射、接收电磁波信号的示意图。可以建立
双程传播时间 t、电磁波在土体介质中的传播速度 v 与探地雷达任意位置行程 L 之间的关系 [15] 。
2
æ
æ
2
(H + r ) + ç L + d ö ÷ + (H + r ) + ç L - d ö ÷ 2
2
t = è 2 ø è 2 ø (1)
v
式中:H 为管道覆土厚度;r 为管道半径;d 为探地雷达系统发射、接收天线之间的距离,这里发
图 1 雷达垂直地下管道扫描时雷达波发射与接收示意
— 782 —