
Page 14 - 2025年第56卷第1期
P. 14
System) 的拱坝设计方法,降低了计算成本;Hariri 等 [25] 提出了基于自动机器学习的二维混凝土坝抗
震设计方法,并通过代理模型实现了优化设计。
综上,智能设计已经发展出以数据和机理为核心的研究框架。未来的发展趋势将从隐式代理模型
逐步转向以显式机理约束为基础的智能设计方法,例如物理信息神经网络(Physics-Informed Neural
Networks,PINN)。此外,为了构建更可靠、可信和可解释的智能设计方法,未来将更多地融合设计
知识和工程经验,推动机理、数据和知识多源驱动的智能设计,成为实现自主设计的重要方向。
4.2 智能建设
4.2.1 智能仿真 施工仿真技术可追溯至自 1990 年代,并在实际工程实践中日臻成熟。其发展历程可
以分为计算机模拟、施工系统仿真、可视化动态仿真、数据驱动仿真和施工智能仿真五个阶段。智能
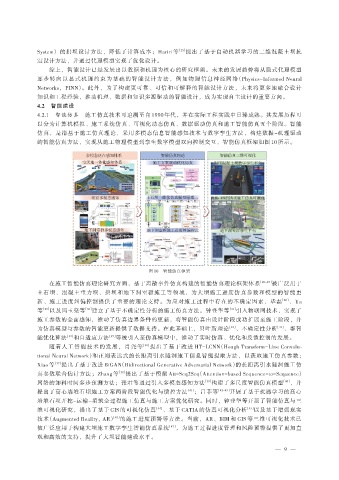
仿真,是指基于施工仿真理论,采用多模态信息智能感知技术与数字孪生方法,构建数据-机理驱动
的智能仿真方法,实现从施工物理模型到孪生数字模型双向控制交互,智能仿真框架如图 10 所示。
图 10 智能仿真框架
在施工智能仿真理论研究方面,基于离散事件仿真构建的智能仿真理论框架体系 [26-27] 被广泛用于
土石坝、混凝土重力坝、拱坝和地下洞室群施工等领域,为大坝施工进度仿真参数和模型的智能更
新、施工进度纠偏控制提供了重要的理论支持。为应对施工过程中存在的不确定因素,毕磊 [28] 、Yu
等 [29] 以及闫玉亮等 [30] 建立了基于不确定性分析的施工仿真方法。钟登华等 [31] 引入物联网技术,实现了
施工参数的全面感知,推动了仿真边界条件的更新,将智能仿真由设计阶段成功扩展至施工阶段,并
为仿真模型与参数的智能更新提供了数据支持。在此基础上,贝叶斯理论 [32] 、不确定性分析 [33] 、群智
能优化算法 [34] 和自适应方法 [35] 等被引入至仿真模型中,推动了实时仿真、优化和反馈控制的发展。
随着人工智能技术的发展,肖尧等 [36] 提出了基于改进 HT-LCNN(Hough Transform-Line Convolu⁃
tional Neural Network)和正则表达式的长距离引水隧洞施工信息智能提取方法,以获取施工仿真参数;
Xiao 等 [37] 提出了基于改进 BiGAN(Bidirectional Generative Adversarial Network)的长距离引水隧洞施工仿
真参数联合估计方法;Zhang 等 [38] 提出了基于模糊 Att-Seq2Seq(Attention-based Sequence-to-Sequence)
网络的卸料时间多步预测方法;张君等通过引入多模态感知方法 [39] 构建了多尺度智能仿真模型 [40] ,并
提出了高心墙堆石坝施工方案两阶段智能优化与馈控方法 [41] ;吕菲等 [42-43] 开展了基于机器学习的高心
墙堆石坝开挖-运输-填筑全过程施工仿真与施工方案优化研究。同时,钟登华等开展了智能仿真与三
维可视化研究,提出了基于 GIS 的可视化仿真 [44] 、基于 CATIA 的仿真可视化分析 [45] 以及基于增强现实
[46]
技术(Augmented Reality,AR) 的施工进度预警等方法。当前,AR、BIM 和 GIS 等三维可视化技术已
被广泛应用于构建大坝施工数字孪生智能仿真系统 [47] ,为施工过程进度管理和风险预警提供了更加直
观和高效的支持,提升了大坝智能建设水平。
— 9 —