
Page 30 - 2022年第53卷第9期
P. 30
对以上三个潜在灌溉区进行综合,获得最终的区域实际灌溉范围:
Irrig = Irrig∩Irrig∩Irrig (12)
1 2 3
4 结果与分析
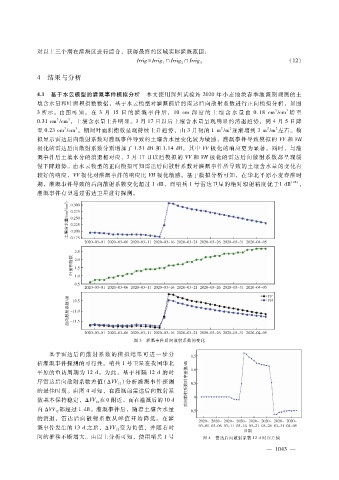
4.1 基于水云模型的灌溉事件模拟分析 本文使用深州试验站 2020年小麦地块春季灌溉期观测的土
壤含水量和叶面积指数数据,基于水云模型对灌溉前后的雷达后向散射系数进行正向模拟分析,如图
3
3
3所示。由图 可 知, 在 3月 15日 的 灌 溉 事 件 后,10cm 深 度 的 土 壤 含 水 量 由 0.18cm ?cm 增 至
3
3
0.31cm ?cm ,土壤含水量上升明显。3月 17日以后土壤含水量呈现明显的消退趋势,到 4月 5日降
2
2
2
2
3
3
至 0.23cm ?cm 。期间叶面积指数呈现持续上升趋势,由 3月初的 1m ?m 逐渐增到 3m ?m 左右。模
拟显示雷达后向散射系数对灌溉事件导致的土壤含水量变化较为敏感,灌溉事件导致模拟的 VV和 VH
极化的雷达后向散射系数分别增加了 1.51dB和 1.14dB,其中 VV极化的响应更为显著。同时,与灌
溉事件后土壤水分的消退相对应,3月 17日以后模拟的 VV和 VH极化的雷达后向散射系数都呈现缓
慢下降趋势。由水云模型的正向模拟可知雷达后向散射系数对灌溉事件所导致的土壤含水量的变化有
较好的响应,VV极化对灌溉事件的响应比 VH极化敏感。基于模拟分析可知,在华北平原小麦春灌时
期,灌溉事件导致的后向散射系数变化超过 1dB,而哨兵 1号雷达卫星的绝对辐射精度优于1dB [22] ,
灌溉事件有望通过雷达卫星进行探测。
图 3 灌溉事件后向散射系数的变化
基于雷达后向散射系 数的 模拟结 果可进 一步分
析灌溉事件探测的可行性。哨兵 1号卫星在我国华北
平原的重访周期为 12d。为此,基于相隔 12d的时
序雷达后向散射系数差值( Δ VV )分析灌溉事件探测
12
的最佳时期。由图 4可知,在灌溉前雷达后向散射系
数基本保持稳定,Δ VV 在 0附近。而在灌溉后的 10d
12
内 Δ VV 都超过 1dB。灌溉事件后,随着土壤含水量
12
的消退,雷达后向散 射系 数从 峰值 开始降 低。在灌
溉事件发生的 13d之后,Δ VV 变为负值,并随着时
12
间的推移不断增大。由以上分析可知,使用哨兵 1号 图 4 雷达后向散射系数 12d时序差值
— 1 4 3 —
0