
Page 43 - 2022年第53卷第9期
P. 43
Num 等于窗口内识别为 Label的时刻点数量,因此满足公式(16)表示,对于持续时间不超过 0.03s
Label i i
的且在移动窗口中比率 ratio低于界限 ratio的噪声进行消除,在这里 ratio大小设置为 0.1。
c c
对平滑后的活动类别 Label持续时间使用下式计算:
i
T = 0 .03N (17)
Label i
式中:T为活动类别为 Label的持续时间,s;N 为连续预测为 Label的时刻点数量。
i Label i i
3 工程实例
以两河口大型高堆石坝工程为研究对象,开展多模态感知驱动下高堆石坝施工仿真参数更新集成
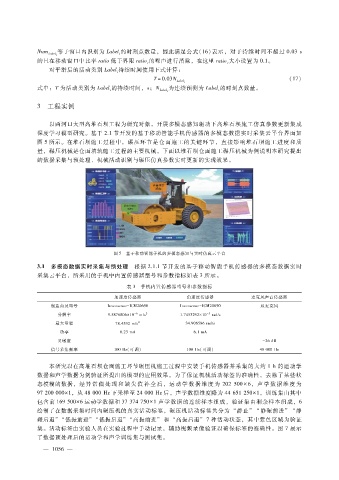
深度学习模型研究。基于 2.1节开发的基于移动智能手机传感器的多模态数据实时采集云平台界面如
图 5所示。在堆石坝施工过程中,碾压环节是仓面施工的关键环节,直接影响堆石坝施工进度和质
量,碾压机械是仓面填筑施工过程的主要机械。下面以堆石坝仓面施工碾压机械为例说明本研究提出
的数据采集与预处理、机械活动识别与碾压仿真参数实时更新的实现效果。
图 5 基于移动智能手机的多模态感知与实时仿真云平台
3.1 多模态数据实时采集与预处理 根据 2.1.1节开发的基于移动智能手机传感器的多模态数据实时
采集云平台,所采用的手机中内置传感器型号和参数指标如表 3所示。
表 3 手机内置传感器型号和参数指标
加速度传感器 角速度传感器 麦克风声音传感器
制造商及型号 Invensense - ICM20690 Invensense - ICM20690 双麦克风
- 5
- 6
2
分辨率 9.5876806 × 10 m?s 1.7453292 × 10 rad?s
最大量程 78.4532m?s 2 34.906586rad?s
功率 0.23mA 6.1mA
灵敏度 - 26dB
信号采集频率 100Hz(可调) 100Hz(可调) 48000Hz
本研究以在高堆石坝仓面施工环节碾压机施工过程中安装手机传感器并采集的大约 1h的运动学
数据和声学数据为例验证所提出的模型的应用效果。为了保证机械活动标签的准确性,去除了某些状
态模糊的数据,经 异 常 值 处 理 和 缺 失 值 补 全 后,运 动 学 数 据 维 度 为 202500 × 6,声 学 数 据 维 度 为
97200000 × 1,从 48000Hz下采样至 24000Hz后,声学数据维度降为 44651250 × 1,训练集由其中
包含前 169500 × 6运动学数据和 37374750 × 1声学数据的连续样本组成,验证集由剩余样本组成,6
绘制了在数据采集时间内碾压机的真实活动标签,碾压机活动标签共分为 “静止” “静碾前进” “静
碾后退” “低振前进” “低振后退” “高振前进” 和 “高振后退” 7种活动状态,其中紫色区域为验证
集。活动标签由实验人员在实验过程中手动记录,辅助视频录像验证以确保标签的准确性。图 7展示
了数据预处理后的运动学和声学训练集与测试集。
5
— 1 0 6 —