
Page 48 - 2022年第53卷第9期
P. 48
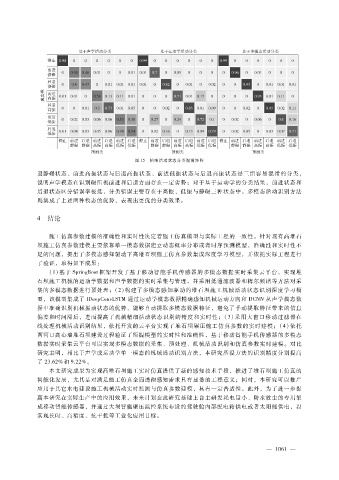
图 15 精细活动状态分类混淆矩阵
退静碾状态、前进高振状态与后退高振状态、前进低振状态与后退高振状态是三组容易混淆的分类,
说明声学模态在识别碾压机前进和后退方面存在一定劣势;对于基于运动学的分类结果,前进状态和
后退状态区分错误率极低,分类错误主要存在于高振、低振与静碾三种状态中。多模态活动识别方法
则集成了上述两种模态的优势,表现出更优的分类效果。
4 结论
施工仿真参数建模的准确性和实时性决定着施工仿真模型与实际工程的一致性。针对现有高堆石
坝施工仿真参数建模主要依靠单一模态数据建立动态概率分布或者时序预测模型,准确性和实时性不
足的问题,提出了多模态感知驱动下高堆石坝施工仿真参数集成深度学习模型,并依托实际工程进行
了验证,取得如下成果:
( 1)基于 SpringBoot框架开发了基于移动智能手机传感器的多模态数据实时采集云平台,实现堆
石坝施工机械的运动学数据和声学数据的实时采集与管理,并采用低通滤波器和梅尔频谱等方法对采
集的多模态数据进行预处理;( 2)构建了多模态感知驱动的堆石坝施工机械活动状态识别深度学习模
型,该模型集成了 IDeepConvLSTM通过运动学模态数据精确感知机械运动方向和 DCNN从声学模态数
据中准确识别机械振动状态的优势,能够自动提取多模态数据特征,避免了手动提取特征带来的信息
偏差和时间滞后,进而提高了机械精细活动状态识别的精度和实时性;( 3)采用大窗口移动过滤器在
线处理机械活动识别结果,依托开发的云平台实现了堆石坝碾压施工仿真参数的实时建模;(4)依托
两河口高心墙堆石坝建设过程验证了所提模型的实时性和准确性,基于移动智能手机传感器的多模态
数据实时采集云平台可以实现多模态数据的采集、预处理、机械活动识别和仿真参数实时建模。对比
研究表明,相比于声学或运动学单一模态的机械活动识别方法,本研究所提方法的识别精度分别提高
了 23.62%和 9.22%。
本文研究成果为实现高堆石坝施工实时仿真提供了新的感知技术手段,推进了堆石坝施工仿真的
智能化发展,尤其是对满足施工仿真全面透彻感知需求具有显著的工程意义;同时,本研究可以推广
应用于其它水电建设施工机械活动实时监测与仿真参数建模,具有一定普适性。此外,为了进一步提
高本研究在实际生产中的应用效果,未来计划在此研究基础上自主研发耗电量小、防水放尘的专用集
成移动智能传感器,并通过大坝智能碾压监控系统布设的驾驶舱内部配电箱供电或者太阳能供电,以
实现长时、高精度、抗干扰等工业化应用目标。
0
— 1 6 1 —