
Page 47 - 2022年第53卷第9期
P. 47
3.4 对比分析与讨论 该模块为了验证所开发的方法,本研究基于同一组数据集对比了基于运动学的
机械活动分类、基于声学的机械活动分类和基于混合模态的机械活动分类。混淆矩阵分类结果如图 13—
15所示,并根据其分别统计了精细活动状态分类(7种类别,如 4.2节所述)、振动状态分类(4种类
别:高振、低振、静碾、静止)和行进状态分类( 3种类别:前进、后退、静止)的分类准确率,如表 5
所示。总体来看,无论是对于单一模态还是多模态方法,活动类别细节层次越高(划分种类越多),识
别结果准确率越差。
表 5 不同层级分类准确率
7种活动分类 振动状态分类:高振、低振、静碾、静止 行进方向分类:前进、后退、静止
声学 66.55% 90.41% 71.84%
运动学 80.95% 83.44% 96.84%
多模态 90.17% 93.87% 95.64%
此外,不同模态的数据在不同分类方案中的表现各有优劣。声学数据在识别机械振动状态时准确
率更高(达到了 90.41%),然而在识别机械前进后退活动时准确率较差(71.84%),所以在 7种类别分
类中分类效果较差,准确率仅为 66.55%,这是符合实际情况的,主要是由于碾压机在不同振动状态时
的噪声状态存在较大区别,但是在同一振动状态下的前进后退两种类别中区别较小。与之相反的是,
运动学数据在识别机械行进状态时表现更优,准确率高达 96.84%,然而在振动状态分类识别中表现略
逊一筹,识别准确率为 83.44%,在 7种类别分类中的识别准确率优于声学数据,但是仍然不够理想,
识别准确率为 80.95%。多模态方法集成了声学数据和运动学数据的优势,相比于声学或运动学单一模
态,在精细活动状态分类时表现最好,准确率分别提高了 23.62%和 9.22%。
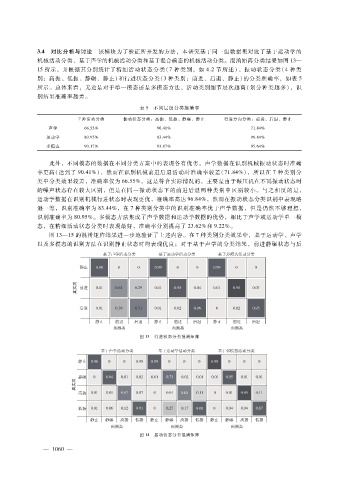
图 13—15的混淆矩阵结果进一步地验证了上述内容。在 7种类别分类效果中,基于运动学、声学
以及多模态的识别方法在识别静止状态时均表现优良;对于基于声学的分类结果,前进静碾状态与后
图 13 行进状态分类混淆矩阵
图 14 振动状态分类混淆矩阵
6
— 1 0 0 —