
Page 75 - 2023年第54卷第11期
P. 75
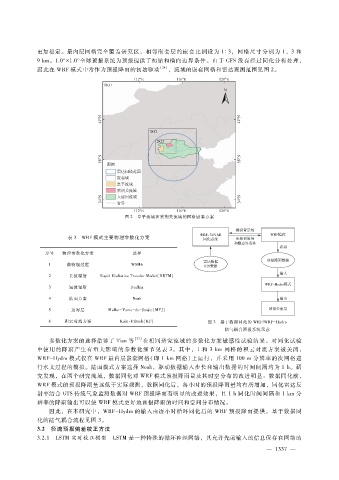
更加稳定。最内层网格完全覆盖研究区,相邻嵌套层的嵌套比例设为 1∶3,网格尺寸分别为 1、3和
9km。1.0° × 1.0°全球预报系统为预报提供了初始和横向边界条件。由于 GFS没有经过同化分析处理,
因此在 WRF模式中常作为预报降雨的初始驱动 [24] ,流域的嵌套网格和雷达观测范围见图 2。
图 2 阜平流域和紫荆关流域的网格嵌套方案
表 3 WRF模式主要物理参数化方案
序号 物理参数化方案 选择
1 微物理过程 WSM6
2 长波辐射 RapidRadiativeTransferModel(RRTM)
3 短波辐射 Dudhia
4 陆面方案 Noah
5 边界层 Mellor - Yama - da - Janjic(MYJ)
6 积云对流方案 Kain - Fritsch(KF) 图 3 基于数据同化的 WRF?WRF - Hydro
陆气耦合预报系统示意
参数化方案的选择借鉴了 Tian等 [22] 在相同研究流域的参数化方案敏感性试验结果。对同化试验
中使用的降雨产生有重大影响的参数化细节见表 3。其中,1和 3km网格的积云对流方案被关闭,
WRF - Hydro模式仅在 WRF最内层嵌套网格(即 1km网格)上运行,并采用 100m分辨率的次网格进
行水文过程的模拟。陆面模式方案选择 Noah,驱动数据输入步长和输出数据的时间间隔均为 1h。研
究发现,在两个研究流域,数据同化对 WRF模式预报降雨量及其时空分布的改进明显:数据同化前,
WRF模式的预报降雨量远低于实际观测,数据同化后,各小时的预报降雨量均有所增加,同化雷达反
射率结合 GTS传统气象监测数据对 WRF预报降雨有明显的改进效果,且 1h同化时间间隔和 1km分
辨率的降雨输出可以使 WRF模式更好地预报降雨的时间和空间分布情况。
因此,在本研究中,WRF - Hydro的输入由逐小时循环同化后的 WRF预报降雨提供,基于数据同
化的陆气耦合流程见图 3。
3.2 径流预报偏差校正方法
3.2.1 LSTM实时校正模型 LSTM是一种特殊的循环神经网络,其允许先前输入的信息保存在网络的
3
— 1 3 7 —