
Page 119 - 2024年第55卷第2期
P. 119
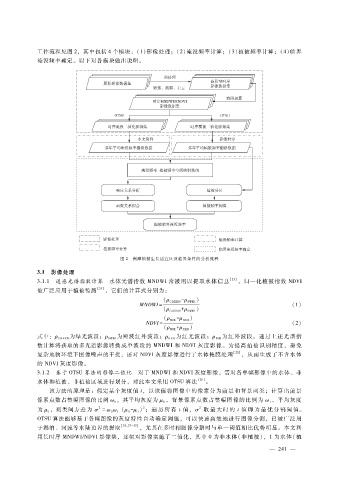
工作流程见图 2,其中包括 4个模块:(1)影像处理;(2)淹没频率计算;(3)植被频率计算;(4)临界
淹没频率确定。以下对各模块做出说明。
图 2 洲滩植被生长适宜区及临界条件的分析流程
3.1 影像处理
3.1.1 遥感光谱指数计算 水体光谱指数 MNDWI常被用以提取水体信息 [23] ,归一化植被指数 NDVI
被广泛应用于植被监测 [24] ,它们的计算式分别为:
- )
( ρ GREEN ρ SWIR
MNDWI = (1)
+ )
( ρ GREEN ρ SWIR
- )
( ρ NIR ρ RED
NDVI = (2)
+ )
( ρ NIR ρ RED
为红外波段。通过上述光谱指
式中:ρ GREEN 为绿光波段;ρ SWIR 为短波红外波段;ρ RED 为红光波段;ρ NIR
数计算将获取的多光谱影像转换成单波段的 MNDWI和 NDVI灰度影像。为提高植被识别精度,避免
复杂地物环境下图像噪声的干扰,还对 NDVI灰度影像进行了水体掩膜处理 [25] ,从而生成了不含水体
的 NDVI灰度影像。
3.1.2 基于 OTSU算法的影像二值化 对于 MNDWI和 NDVI灰度影像,需对各单幅影像中的水体、非
水体和植被、非植被区域进行划分,对此本文采用 OTSU算法 [26] 。
该方法的原理是:假定某个灰度值 t,以该值将图像中的像素分为前景和背景两类;计算出前景
,平均灰度
像素点数占整幅图像的比例 ω 0 ,其平均灰度为 μ 0 ,背景像素点数占整幅图像的比例为 ω 1
2 2 2
( - );遍 历 所 有 t值,σ 取 最 大 时 的 t值 即 为 最 优 分 割 阈 值。
为 μ 1 ,则类间方差 为 σ = ω 0 ω 1 μ 0 μ 1
OTSU算法能够基于各幅图像的灰度特性自动确定阈值,可以快速高效地进行图像分割,已被广泛用
于湖泊、河流等水陆边界的提取 [25,27 - 29] ,尤其在多时相图像分割时与单一阈值相比优势明显。本文利
用长时序 MNDWI?NDVI影像集,逐幅对影像实施了二值化,其中 0为非水体(非植被),1为水体(植
— 2 4 1 —