
Page 50 - 水利学报2025年第56卷第3期
P. 50
空间分辨率的地表监测。本研究使用的 Sentinel - 2L1C产品需利用 SNAP工具进行大气校正与格式转
换处理。为便于多源遥感数据的协同使用,预处理完毕后多源遥感数据空间分辨率统一为 10m,坐标
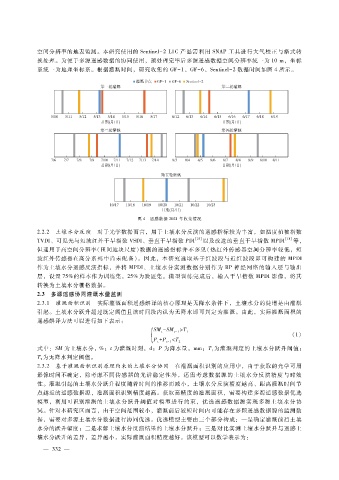
系统一为地理坐标系。根据灌溉时间,研究收集的 GF - 1、GF - 6、Sentinel - 2数据时间如图 4所示。
图 4 遥感数据 2021年收集情况
2.2.2 土壤水分反演 对于光学数据而言,用于土壤水分反演的遥感指标较为丰富,如温度植被指数
[18]
[23]
TVDI、可见光与短波红外干旱指数 VSDI、垂直干旱指数 PDI 以及改进的垂直干旱指数 MPDI 等,
但通用于高空间分辨率(田间地块尺度)数据的遥感指标并不多见(热红外传感器空间分辨率较低,短
波红外传感器在高分系列中尚未配备)。因此,本研究选取基于红波段与近红波段即可构建的 MPDI
作为土壤水分遥感反演指标,并将 MPDI、土壤水分实测数据分别作为 BP神经网络的输入层与输出
层,设置 75%的样本作为训练集,25%为验证集。模型训练完成后,输入干旱指数 MPDI影像,将其
转换为土壤水分栅格数据。
2.3 多源遥感协同灌溉水量监测
2.3.1 灌溉面积识别 实际灌溉面积遥感解译的核心原理是无降水条件下,土壤水分的陡增是由灌溉
引起。土壤水分跃升超过既定阈值且该时间段内认为无降水即可判定为灌溉。由此,实际灌溉面积的
遥感解译方法可以进行如下表示:
{ SM - SM >T 1 (1)
t
t - 1
P+ P <T
t t - 1 2
式中:SM为土壤水分,%;t为灌溉时刻,d;P为降水量,mm;T为灌溉判定的土壤水分跃升阈值;
1
T为无降水判定阈值。
2
2.3.2 基于灌溉面积识别原理约束的土壤水分协同 在灌溉面积识别的应用中,由于获取的光学可用
影像时间不确定,除考虑不同传感器的光谱稳定性外,还需考虑数据源的土壤水分反演精度与时效
性。灌溉引起的土壤水分跃升程度随着时间的推移而减小,土壤水分反演精度越高、距离灌溉时间节
点越近的遥感数据源,灌溉面积识别精度越高。获取高精度的灌溉面积,需要构建多源遥感数据优选
模型,利用可识别灌溉的土壤水分跃升阈值对模型进行约束,优选遥感数据源实现多源土壤水分协
同。针对本研究区而言,由于空间范围较小,灌溉前后较短时间内可能存在多颗遥感数据源的监测数
据,需要对多源土壤水分数据进行协同优选。优选模型主要由三个部分构成:一是确定灌溉前后土壤
水分的跃升幅度;二是求解土壤水分反演结果的土壤水分跃升;三是对比实测土壤水分跃升与遥感土
壤水分跃升的差异,差异越小,实际灌溉面积精度越好。该模型可以数学表示为:
2
— 3 3 —