
Page 53 - 水利学报2025年第56卷第3期
P. 53
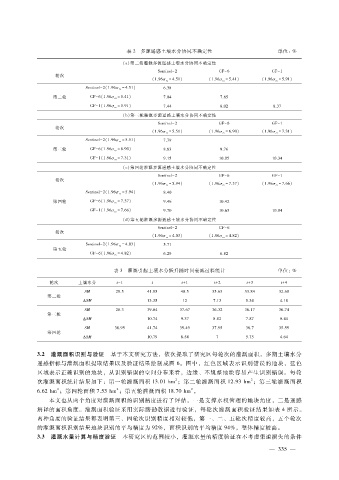
表 2 多源遥感土壤水分协同不确定性 单位:%
(a)第二轮灌溉多源遥感土壤水分协同不确定性
Sentinel - 2 GF - 6 GF - 1
轮次
=
=
=
(1.96 σ rs 4.51 ) (1.96 σ rs 5.41 ) (1.96 σ rs 5.91 )
=
Sentinel - 2(1.96 σ rs 4.51 ) 6.38
=
第二轮 GF - 6 (1.96 σ rs 5.41 ) 7.04 7.65
=
GF - 1(1.96 σ rs 5.91 ) 7.44 8.02 8.37
(b)第三轮灌溉多源遥感土壤水分协同不确定性
Sentinel - 2 GF - 6 GF - 1
轮次
=
=
(1.96 σ rs 5.51) (1.96 σ rs 6.90) (1.96 σ rs 7.31)
=
Sentinel - 2(1.96 σ rs 5.51 ) 7.79
=
=
第三轮 GF - 6 (1.96 σ rs 6.90) 8.83 9.76
=
GF - 1 (1.96 σ rs 7.31 ) 9.15 10.05 10.34
(c)第四轮灌溉多源遥感土壤水分协同不确定性
Sentinel - 2 GF - 6 GF - 1
轮次
=
=
=
(1.96 σ rs 5.94 ) (1.96 σ rs 7.37 ) (1.96 σ rs 7.66 )
=
Sentinel - 2(1.96 σ rs 5.94 ) 8.40
=
第四轮 GF - 6 (1.96 σ rs 7.37) 9.46 10.42
=
GF - 1(1.96 σ rs 7.66 ) 9.70 10.63 10.84
(d)第五轮灌溉多源遥感土壤水分协同不确定性
Sentinel - 2 GF - 6
轮次
(1.96 σ rs 4.03) (1.96 σ rs 4.82)
=
=
=
Sentinel - 2(1.96 σ rs 4.03 ) 5.71
第五轮
GF - 6(1.96 σ rs 4.82 ) 6.29 6.82
=
表 3 灌溉引起土壤水分跃升随时间衰减过程统计 单位:%
轮次 土壤水分 t - 1 t t + 1 t + 2 t + 3 t + 4
SM 28.5 41.85 40.5 35.63 33.84 32.68
第二轮
Δ SM 13.35 12 7.13 5.34 4.18
SM 28.3 39.04 37.67 36.32 36.17 36.74
第三轮
Δ SM 10.74 9.37 8.02 7.87 8.44
SM 30.95 41.74 39.49 37.95 36.7 35.59
第四轮
Δ SM 10.79 8.54 7 5.75 4.64
3.2 灌溉面积识别与验证 基于本文研究方法,依次提取了研究区每轮次的灌溉面积,多期土壤水分
遥感指标与灌溉面积提取结果以及验证结果绘制成图 6。图中,红色区域表示识别错误的地块,蓝色
区域表示正确识别的地块,从识别错误的空间分布来看,边缘、不规整地块容易产生识别错误。每轮
2
2
次灌溉面积统计结果如下:第一轮灌溉面积 13.01hm ;第二轮灌溉面积 12.93hm ;第三轮灌溉面积
2
2
2
6.62hm ;第四轮面积 7.53hm ;第五轮灌溉面积 18.70hm 。
本文也从两个角度对灌溉面积的识别精度进行了评估,一是支撑水权管理的地块角度,二是遥感
解译的面积角度。灌溉面积验证采用实际踏勘数据进行验证,每轮次灌溉面积验证结果如表 4所示。
两种角度的验证结果都表明第三、四轮次识别精度相对较低,第一、二、五轮次精度较高,五个轮次
的灌溉面积识别结果地块识别的平均精度为 92%,面积识别的平均精度 94%,整体精度较高。
3.3 灌溉水量计算与精度验证 本研究区的范围较小,灌溉水量的精度验证在不考虑渠道损失的条件
— 3 3 5 —