
Page 122 - 2022年第53卷第9期
P. 122
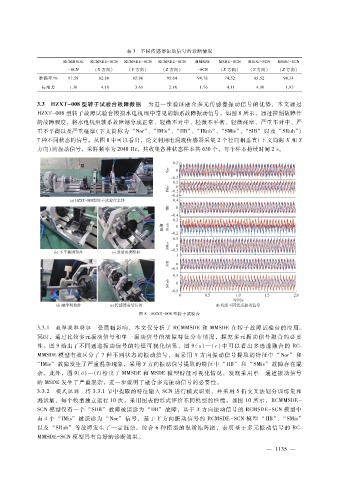
表 3 不同传感器振动信号的诊断情况
RCMMSDE RCMSDE - SCN RCMSDE - SCN RCMSDE - SCN MMSDE MSDE - SCN MSDE - SCN MSDE - SCN
- SCN (X方向) (Y方向) (Z方向) - SCN (X方向) (Y方向) (Z方向)
准确率?% 97.58 82.60 85.96 95.64 94.78 74.52 83.52 94.34
标准差 1.36 4.18 3.61 2.16 1.76 4.11 4.10 1.83
3.3 HZXT - 008型转子试验台故障数据 为进一步验证融合多元传感器振动信号的优势,本文通过
HZXT - 008型转子故障试验台模拟水电机组中常见的轴系故障振动信号。如图 8所示,通过控制故障件
的故障程度,将水电机组轴系故障划分成正常、轻微不对中、轻微不平衡、轻微碰摩、严重不对中、严
重不平衡以及严重碰摩(下文简称为 “ Nor”、“IMis”、“IIB”、“IRub”、“SMis”、“SIB” 以及 “SRub”)
7种不同状态的信号。从图 8中可以看出,论文利用电涡流传感器采集 2个径向相垂直(下文简称 X和 Y
方向)的振动信号,采样频率为 2048Hz,共收集各种状态样本共 630个,每个样本持续时间 2s。
图 8 HZXT - 008型转子试验台
3.3.1 故障提取特征 受篇幅影响,本文仅分析了 RCMMSDE和 MMSDE在转子故障试验台的应用。
同时,通过比较多元振动信号和单一振动信号的故障特征分布情况,探究多元振动信号融合的必要
性。图 9给出了不同通道振动信号的特征可视化结果,图 9(a)—(c)中可以看出多通道融合的 RC
MMSDE模型有效区分了 7种不同状态的振动信号,而采用 X方向振动信号提取的特征中 “Nor” 和
“ IMis” 故障发生了严重混杂现象,采用 Y方向振动信号提取的特征中 “IIB” 和 “SMis” 故障存在混
杂。此外,图 9(d)—(f)给出了 MMSDE和 MSDE模型特征可视化情况,发现采用单一通道振动信号
的 MSDE发生了严重混杂,进一步说明了融合多元振动信号的必要性。
3.3.2 模式识别 将 3.3.1节中提取的特征输入 SCN进行模式识别,并采用 5折交叉法划分训练集和
测试集,每个模型独立运行 10次,采用图表的形式评价不同模型的性能。如图 10所示,RCMMSDE -
SCN模型仅有一个 “SIIB” 故障被误诊为 “IIB” 故障,基于 X方向振动信号的 RCMSDE - SCN模型中
有 4个 “IMis” 被误诊为 “Nor” 信号,基于 Y方向振动信号的 RCMSDE - SCN模型 “IIB”、“SMis”
以及 “ SRub” 等故障发生了一定混杂。综合 6种模型的混淆矩阵图,表明基于多元振动信号的 RC
MMSDE - SCN模型具有良好的诊断效果。
1
— 1 3 5 —