
Page 110 - 2022年第53卷第11期
P. 110
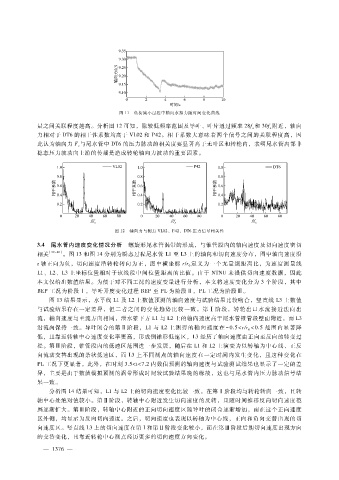
图 11 负荷减小过程中轴向水推力随时间变化曲线
量之间关联程度越高。分析图 12可知,除较低频率范围及导叶、叶片通过频率 28f和 30f附近,轴向
n
n
力相对于 DT6的相干性系数均高于 VL02和 P42。相干系数大意味着两个信号之间的关联程度高,因
此认为轴向力 F与尾水管中 DT6的压力脉动的相关度要显著高于无叶区和转轮内,表明尾水管内部非
z
稳态压力波动向上游的传播是造成转轮轴向力波动的重要因素。
图 12 轴向力与测点 VL02、P42、DT6压力信号相关性
3.4 尾水管内速度变化情况分析 螺旋形尾水管涡带的形成,与锥管段内的轴向速度及切向速度密切
相关 [39 - 40] 。图 13和图 14分别为瞬态过程尾水管 L1至 L3上的轴向和切向速度分布,图中轴向速度沿
z轴正向为负,切向速度沿转轮转向为正,图中横坐标 r?r定义为一个无量纲距离比,为速度测量线
0
L1、L2、L3上坐标位置相对于该线段中间位置距离的比值。由于 NTNU未提供切向速度数据,因此
本文仅给出数值结果。为便于对不同工况的速度变量进行分析,本文将速度变化分为 3个阶段,其中
BEP工况为阶段Ⅰ,导叶开度变化过程 BEP至 PL为阶段Ⅱ,PL工况为阶段Ⅲ。
图 13结果显示,水平线 L1及 L2上数值预测的轴向速度与试验结果比较吻合,竖直线 L3上数值
与试验结果存在一定差异,但二者之间的变化趋势比较一致。第Ⅰ阶段,转轮出口水流接近法向出
流,轴向速度与主流方向相同,泄水锥下方 L1与 L2上的轴向速度高于尾水管锥管段壁面附近,而 L3
沿流向保持一致。导叶闭合的第Ⅱ阶段,L1与 L2上测得的轴向速度在 - 0.5< r?r<0.5范围内显著降
0
低,且靠近转轴中心速度变化率更高,形成倒锥形低速区,L3经历了轴向速度由正向至反向的转变过
程。第Ⅲ阶段,锥管段内的低速区范围进一步发展,随后在 L1和 L2上演变为以转轴为中心线、正反
向流动交替出现的条状低速区,而 L3上不同测点的轴向速度在一定时间内发生变化,且这种变化在
PL工况下更显著。此外,在时刻 3.5<t<7.2内数值预测的轴向速度与试验测试结果也显示了一定的差
异,主要是由于数值模拟预测的涡带形成时间较试验结果晚的缘故,这也与尾水管内压力脉动信号结
果一致。
分析图 14结果可知,L1与 L2上的切向速度变化比较一致,在第Ⅰ阶段均与转轮转向一致,且转
轴中心处绝对值较小。第Ⅱ阶段,转轴中心附近发生切向速度的反转,且随时间推移反向切向速度范
围逐渐扩大。第Ⅲ阶段,转轴中心附近的正向切向速度区随导叶的闭合逐渐增加,而在这个正向速度
区外侧,均显示为反向切向速度。之后,切向速度也表现以转轴为中心线,正向和负向交替出现的切
向速度区。竖直线 L3上的切向速度在第 I和第Ⅱ阶段变化较小,而在第Ⅲ阶段后期切向速度出现方向
的交替变化,且靠近转轮中心测点经历更多的切向速度方向变化。
— 1 3 6 —
7