
Page 123 - 2023年第54卷第11期
P. 123
3.2 SDP参数化 利用 SDP图像表示信号时,能够同时表达不同组的信号。在极坐标空间中,为了
更好地区分和显示不同信号的特征,参数 ζ 、θ 和 t的选择至关重要。在参数选取时,应综合考虑不同
信号之间的图像差异性或相似性。其中,θ 通常取值是 60°,ζ 和 t选取合理可以提高 SDP图像之间的
分辨率,从而增大不同类型信号间的差别。一般来说,t ∈[1,10],ζ∈[20°,60°]时生成的 SDP图
像比较清晰和理想 [24] 。
在 SDP转化过程中,参数的选取至关重要。为了调整 SDP的参数至图像合适的显示位置,下面
对 SDP参数的来源选择进行说明,为使图像之间的差异更加明显,选用采样频率 200Hz,幅值为 2的
的正弦信号进行说明( SDP的镜像对称平面设置为 2) [25 - 26] 。为了能用 SDP图像准确地区分和显示不同
滚动轴承故障信号的故障特征,本文分别固定 ζ 、θ 和 t的取值并生成不同的图像,在调整参数时应尽
量使 SDP图像占满整个坐标系,尽量避免图像重叠,选择最佳效果的参数作为后续试验的参数,转化
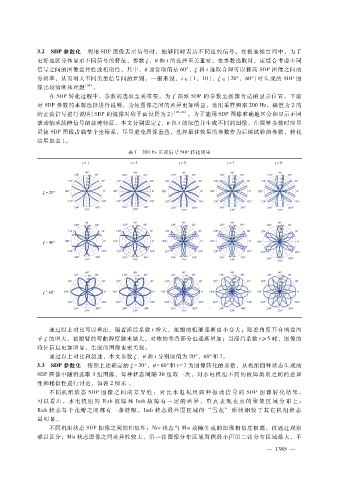
结果如表 1。
表 1 200Hz正弦信号 SDP转化结果
t = 1 t = 3 t = 5 t = 7 t = 9
ζ = 20°
ζ = 40°
ζ = 60°
通过以上对比可以看出,随着滞后系数 t增大,花瓣的粗细逐渐由小变大;随着角度开合增益因
子 ζ 的增大,花瓣臂的弯曲程度越来越大,对称的重叠部分也逐渐增加;当滞后系数 t ≥5时,图像的
特征信息更加明显,生成的图像也更美观。
通过以上对比和叙述,本文参数 ζ 、θ 和 t分别取值为 20°、60°和 7。
3.3 SDP参数化 按照上述确定的 ζ = 20° ,θ = 60° 和 t = 7 为图像转化的参数,从机组四种状态生成的
SDP图像中随机选取 3组图像,每种状态间隔 30组取一次,对水电机组不同的故障类别之间的差异
性和相似性进行讨论,如表 2所示 。
不同机组状态 SDP图像 之 间 的 差 异 性: 对 比 水 电 机 组 四 种 振 动 信 号 的 SDP图 像 转 化 结 果,
可以看出,水电机 组 的 Rub故 障 和 Imb故 障 有 一 定 的 差 异, 重 点 表 现 在 点 的 聚 集 区 域 分 布 上;
Rub状态每个花瓣之间都有一条缝隙,Imb状态最外围区域的 “雪花” 形 状 相 较 于 其 它 机 组 状 态
最明显。
不同机组状态 SDP图像之间的相似性:Nor状态与 Mis故障生成的图像相似度极高,仅通过观察
难以区分;Mis状态图像之间差异性较大,第一张图像分布区域面积最小但第二张分布区域最大,不
3
— 1 8 5 —