
Page 122 - 2023年第54卷第11期
P. 122
步骤 5:将验证集图像输入训练好的 Resnet50中,得到图像特征分类,实现水电机组不同状态的
有效识别和分类,提升辨识精度,完成水电机组故障诊断。
3 试验及验证
3.1 实验数据描述 本文仿真所用软件为 MATLABR2020b,计算机配置为 Intel(R)Xeon(R)Silver
4216CPU@2.10GHz ,机带 RAM 256GB。
水电机组转子具有高速旋转的特性和复杂的运行环境,导致其容易损坏故而给旋转机械的运行
和生产带来极大的安全隐患 [22] 。本试验主要通过转子试验台分别模拟机 组正 常(Normal)状态和碰
磨( Rubbing)、不平衡(Imbalance)、不对中(Misalignment)3种水电机组常见故障(为 便 于后文对这
4种状态进行表示,分别简称为 Nor、Rub、Imb、Mis)。其中,Rub状态由碰磨螺栓旋入碰 磨螺纹
箱并与转轴接触来模拟;Imb状态是通过在轴上放置质量块来实现;Mis状态是由错置联轴 器上两
轴的位置来完成模拟。信号采集时,机组转速设定 为 1200r?min,采 样频 率 为 2048Hz。通过转子
试验台对 4种机组状态分别采集 100组数据,每组数据包含 2048个点,4种机组状态的振动信号如
图 6所示 [23] 。
图 6 转子实验台采集的不同状态振动信号
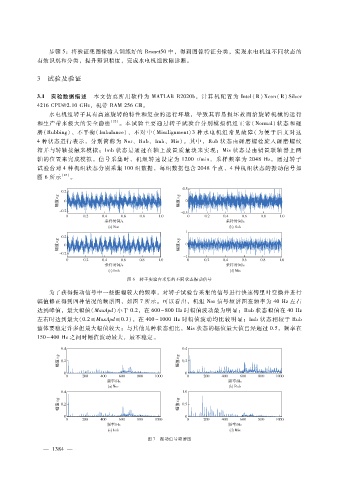
为了获得振动信号中一些振幅较大的频率,对转子试验台采集的信号进行快速傅里叶变换并进行
幅值修正得到四种情况的频谱图,如图 7所示。可以看出,机组 Nor信号频谱图在频率为 40Hz左右
达到峰值,最大幅值( MaxApd)小于 0.2,在 600~800Hz时幅值波动最为明显;Rub状态幅值在 40Hz
左右时达到最大(0.2 ≤MaxApd ≤0.3),在 400~1000Hz时幅值波动均比较明显;Imb状态相较于 Rub
整体要稳定许多但最大幅值较大;与其他几种状态相比,Mis状态的幅值最大值已经超过 0.5,频率在
150~400Hz之间时幅值波动最大,最不稳定。
图 7 振动信号频谱图
— 1 3 4 —
8