
Page 44 - 2025年第56卷第1期
P. 44
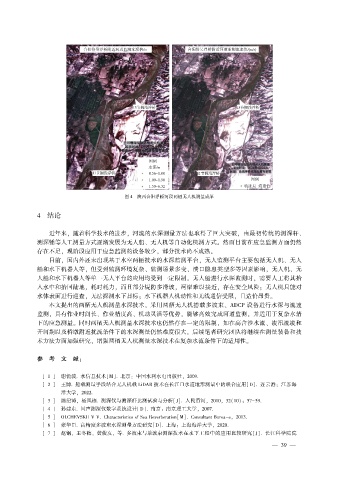
图 4 陕西合阳浮桥河段两栖无人机测量成果
4 结论
近年来, 随着科学技术的进步, 河流的水深测量方法也取得了巨大突破, 由最初传统的测深杆、
测深锤等人工测量方式逐渐发展为无人船、 无人机等自动化机测方式。 然而目前在应急监测方面仍然
存在不足, 现阶段应用于应急监测的设备较少, 部分技术尚不成熟。
目前, 国内外还未出现基于水空两栖技术的水深监测平台, 无人监测平台主要包括无人机、 无人
船和水下机器人等, 但受到监测环境复杂、 监测场景多变、 溃口隐患类型多等因素影响, 无人机、 无
人船和水下机器人等单一无人平台的应用均受到一定限制。 无人船进行水深监测时, 需要人工将其抬
入水中和抬回陆地, 耗时耗力, 而且部分堤防多滑坡, 河岸难以接近, 存在安全风险; 无人机只能对
水体表面进行巡查, 无法探测水下目标; 水下机器人机动性和无线通信受限, 且造价昂贵。
本文提出的两栖无人机测量水深技术, 采用两栖无人机搭载多波束、 ADCP 设备进行水深与流速
监测, 具有作业时间长、 作业精度高、 机动灵活等优势, 能够高效完成河道监测, 并适用于复杂水情
下的应急测量。 同时两栖无人机测量水深技术也仍然存在一定的限制, 如在高含沙水流、 凌汛流凌和
开河期以及桥墩附近扰流条件下的水深测量仍然难度很大, 后续笔者研究团队将继续在测量装备和技
术方法方面加强研究, 增强两栖无人机测量水深技术在复杂水流条件下的适用性。
参 考 文 献:
[ 1 ] 谢悦波. 水信息技术[M]. 北京: 中国水利水电出版社, 2009.
[ 2 ] 王博. 船载测量手段结合无人机载 LiDAR 技术在长江口水道地形测量中的联合应用[D]. 连云港: 江苏海
洋大学, 2022.
[ 3 ] 陈纪涛, 杨凤栋. 测深仪与测深杆比测试验与分析[J]. 人民黄河, 2010, 32(10): 57-59.
[ 4 ] 孙建东. 回声测深仪数字系统设计[D]. 南京: 南京理工大学, 2007.
[ 5 ] OLCHEVSKII V V. Characteristics of Sea Reverberation[M]. Consultant Burea-e, 2013.
[ 6 ] 张华臣. 高精度多波束水深测量方法研究[D]. 上海: 上海海洋大学, 2020.
[ 7 ] 赵钢, 王冬梅, 黄俊友, 等. 多波束与单波束测深技术在水下工程中的应用比较研究[J]. 长江科学院院
— 3 9 —