
Page 40 - 2025年第56卷第1期
P. 40
[45] 数据进行去噪, 并对信号进行分离, 进而得到水深数据。 星载激光雷
DPC)算法对浅海域的 ATLAS
达数据也可以作为参考水深, 将水底信号与多光谱数据进行匹配进而反演得到水深 [46] 。
与基于定位系统和测深仪的测深方法相比, 遥感反演水深技术具有更大的测量范围、 更简便的操
作流程。 此外, 遥感技术本身具备的高空间分辨率、 高时间分辨率和高光谱分辨率特点, 使其在水利
领域, 特别是在水深测量方面发挥了至关重要的作用。 这些优势使得遥感反演水深技术成为水深测量
领域的一项创新和进步。 但同时卫星遥感反演水深也有一定的限制, 其有效范围限于光学浅水区
域 [47] , 另外受到水体上空大气、 水底环境等因素影响, 水深遥感反演的精度普遍在 1~3 m, 严重依赖遥
感图像的分辨率, 精度也低于一般无人船测深精度, 遥感图像分别率及水深反演精度还有待进一步提升。
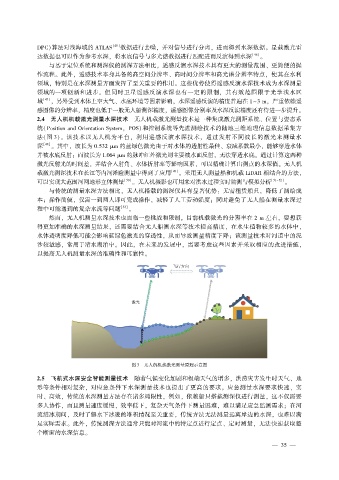
2.4 无人机机载激光测量水深技术 无人机载激光测量技术是一种集成激光测距系统、 位置与姿态系
统(Position and Orientation System, POS)和控制系统等先进测绘技术的陆地三维地理信息数据采集方
法(图 3)。 该技术以无人机为平台, 利用遥感反演水深技术, 通过发射不同波长的激光来测量水
深 [48] 。 其中, 波长为 0.532 μm 的蓝绿色激光由于对水体的透射性最佳、 衰减系数最小, 能够穿透水体
并被水底反射; 而波长为 1.064 μm 的脉冲红外激光则主要被水面反射, 无法穿透水底。 通过计算这两种
激光反射光的时间差, 并结合入射角、 水体折射率等影响因素, 可以精确计算出测点的水深值。 无人机
载激光测深技术在长江等内河滩险测量中得到了应用 [49] 。 采用无人测量船和机载 LiDAR 相结合的方法,
可以实现大范围河网地形立体测量 [50] 。 无人机摄影也可用来对洪水过程实时监测与模拟分析 [51-52] 。
与传统的测量水深方法相比, 无人机搭载的测深仪具有显著优势: 无需租赁船只, 降低了测绘成
本; 操作简便, 仅需一到两人即可完成操作, 减轻了人工劳动强度; 同时避免了无人船在测量水深过
程中可能遇到的复杂水流等问题 [53] 。
然而, 无人机测量水深技术也面临一些挑战和限制。 目前机载激光的分辨率在 2 m 左右, 要想获
得更加准确的水深测量结果, 还需要结合无人船测水深等技术提高精度, 在水生植物较多的水体中,
水体透明度降低可能会影响蓝绿色激光的穿透性, 从而导致测量精度下降; 该测量技术对河道中的泥
沙较敏感, 常用于清水湖泊中。 因此, 在未来的发展中, 需要考虑这些因素并采取相应的改进措施,
以提高无人机测量水深的准确性和可靠性。
图 3 无人机机载激光测量原理示意图
2.5 飞航式水深安全智能测量技术 随着气候变化加剧和极端天气的增多, 洪涝灾害发生时天气、 地
形等条件相对复杂, 对应急条件下水深测量技术也提出了更高的要求。 应急测量水深要求快速、 实
时、 高效, 传统的水深测量方法存在诸多局限性, 例如, 依赖船只搭载测深仪进行测量, 这不仅需要
多人协作, 而且测量速度缓慢, 效率低下, 复杂天气条件下测量困难, 难以满足应急监测需求; 在河
流结冰期间, 及时了解水下冰凌的堆积情况至关重要, 传统方法无法测量远离岸边的水深, 也难以满
足实际需求。 此外, 传统测深方法通常只能对河流中的特定点进行定点、 定时测量, 无法快速获取整
个断面的水深信息。
— 3 5 —