
Page 41 - 2025年第56卷第1期
P. 41
无人机作为新型灵活高效的测量平台, 相比无人船测量水深技术、 卫星遥感反演水深技术、 机载
激光测水深技术等, 具有响应速度快、 生存能力强、 不易受地形限制等特点, 在应急监测中有越来越
广泛的应用 [54-55] 。 根据上述水深测量设备现状, 为提高水深测量的效率, 本文提出了一种飞航式水深
安全智能测量方法, 并设计了一种新型的无人机用于水深测量。 这款无人机配备了超声波测深探头,
能够实时高效地探测水深。 通过利用 RTK 设备的定位功能, 实现了测量路线的自动巡航测量, 并具备
应急打捞的能力。
超声波测深探头和激光测距模块分别用于测量探头到水底的距离和工作舱到水面的距离。 这些数
据通过通信电缆传输至数据采集测控器进行处理, 从而得到测点的水深。 同时, RTK 设备和摄像头模
块通过无线通信模块实时传输图像至移动终端和云端服务器, 使工作人员能够实时监控无人机周围的
环境和水下地形, 这种方法高效且直观。
因此, 飞航式水深安全智能测量方法具有应急条件下高效率、 低成本、 实时监测和操作简便等优
势, 相关技术的研究对于推动水文仪器的现代化发展具有积极意义。
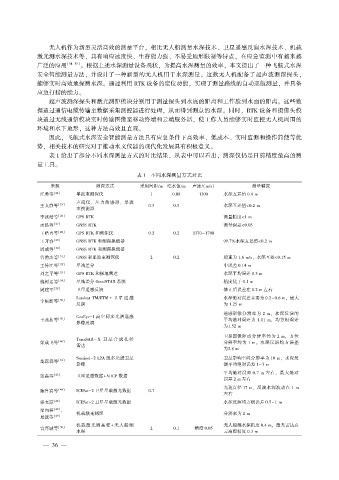
表 1 给出了部分不同水深测量方式的对比结果, 从表中可以看出, 测深仪仍是目前精度最高的测
量工具。
表 1 不同水深测量方式对比
来源 测深方式 采用间距∕m 吃水值∕m 声速∕(m∕s) 测量精度
江勇等 [24] 单波束测深仪 1 0.08 1300 水深互差值 0.4 m
声速仪、 压力传感器、 单波
王文静等 [25] 0.3 0.5 水深互差值<0.2 m
束换能器
李冰皓等 [26] GPS RTK 测量精度<1 m
孟昌等 [27] GNSS RTK 测量误差<0.03
王皓冉等 [28] GPS RTK 和测深仪 0.2 0.2 1370~1700
王开春 [29] GNSS RTK 和测深换能器 99.7%水深互差值<0.2 m
周威等 [30] GNSS RTK 和测深换能器
曹豹杰等 [31] GNSS 和单波束测深仪 2 0.2 船速为 1.6 m∕s, 水深互差<0.15 m
王传江等 [32] 星站差分 中误差 0.14 m
刘之平等 [33] GPS RTK 和探地雷达 水深平均误差 0.5 m
魏树运等 [34] 星站差分 OmniSTAR 系统 精度优于 0.1 m
周建军 [35] 卫星遥感反演 修正后误差在 0.2 m 左右
Landsat TM∕ETM + 卫 星 遥 感 水深绝对误差主要为 0.2~0.6 m, 最大
李畅游等 [36]
反演 为 1.25 m
遥感影像分辨率为 2 m, 水深反演的
GeoEye-1 高空间多光谱遥感
王燕茹等 [39] 平均绝对误差为 1.01 m, 均方根误差
影像反演
为1.52 m
卫星图像距离分辨率约为 2 m, 方位
TerraSAR- X 卫 星 合 成 孔 径
荣成飞等 [40] 分辨率约为 1 m。 水深反演均方误差
雷达
为2.8 m
Sentinel-2 L2A 级多光谱卫星 卫星影响空间分辨率为 10 m, 水深反
楚森森等 [42]
影像 演平均绝对误差 1~3 m
平均绝对误差 0.7 m 左右, 最大绝对
张磊等 [43] 卫星遥感数据+ADCP 数据
误差 2 m 左右
光斑直径 17 m, 反演水深波动在 1 m
陈鲁宾等 [44] ICESat-2 卫星星载激光数据 0.7
左右
张文豪 [46] ICESat-2 卫星星载激光数据 水深反演均方根误差 0.5~1 m
梁向棋 [48] ,
机载激光测深 分辨率为 2 m
夏波等 [49]
机载激光测高程 + 无人船测 无人船测水深精度 0.4 m, 激光雷达点
宫厚诚等 [50] 2 0.1 精度 0.05
水深 云高程精度 0.3 m
— 3 6 —