
Page 38 - 2025年第56卷第1期
P. 38
度及效率得到了进一步提高。 目前, 单波束与多波束测深技术已成为水深测量的常用技术 [7-8] 。
1980 年代, 随着全球定位系统(Global Positioning System, GPS) 的商品化, GPS 定位技术逐渐开
始民用, 并在测绘行业也得到了普及和应用, 这成为测绘科技的一个重大的突破性进展 [9] 。 其中, 实
时动态载波相位差分技术(Real Time Kinematic, RTK) 成为常用的卫星定位测量方法, 可以实现野外
实时厘米级精度的定位测量。 伴随着计算机、 声纳技术的进步, 逐渐发展出 GPS RTK 与测深仪组合技
术, 提升了测量水深的精度和效率 [10] 。 近年来, 随着测绘技术的发展, 测绘仪器设备也更加集成化,
在水域测量领域也出现了集 GPS 定位技术、 声呐测深技术、 无人船导航通讯技术等为一体的无人船测
量系统 [11-12] 。 GPS 定位技术与回声测深技术在黄浦江深水航道测量中得到应用, 并结合惯性导航系统
(Inertial Navigation System, INS)和光纤罗经测姿方式解决了 GPS 动态环境信号失锁干扰问题 [13] 。 多
波束水深测量技术、 侧扫声呐探测技术等在海洋地形测绘中也有广泛应用 [14] 。 目前, 英国 Coda Octopus
公司的 Echoscope 是较为先进的三维实时声纳产品, 可用于海上风电场基桩及海底电缆监测、 海上石
油平台导管架及海底管线的探测、 水电站及港口码头水下检测等多种场景。
上述水深测量技术也存在一些缺点, 如消耗时间长、 测量周期长、 易受到环境影响等。 新发展起
来的遥感反演水深技术由于其测量时间短、 测量快等优势, 被逐步引入到水深测量工作中 [15] 。 近 20
年来, 我国学者将遥感反演水深应用于湖泊、 河道、 湿地等的测量工作中, 同时配合声学多普勒流速
剖面仪(Acoustic Doppler Current Profiler, ADCP)对典型断面进行高精度的连续多点测量 [16] , 可以获得
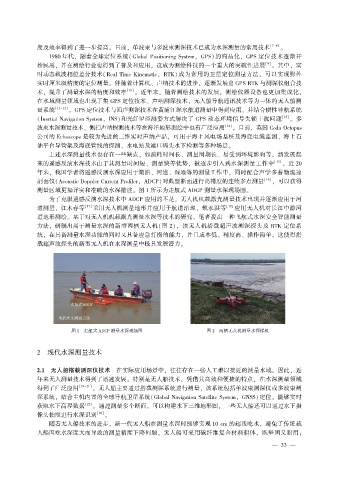
测量区域更加详实和准确的水深描述。 图 1 所示为走航式 ADCP 测量水深现场图。
为了克服遥感反演水深技术中 ADCP 应用的不足, 无人机机载激光测量技术出现并逐渐应用于河
道测量, 江木春等 [17] 采用无人机测量地形并应用于航道治理, 戴永洪等 [18] 应用无人机对长江中游河
道地形测绘。 基于对无人机机载激光测量水深等技术的研究, 笔者提出一种飞航式水深安全智能测量
方法, 研制出用于测量水深的新型两栖无人机(图 2), 该无人机搭载超声波测深探头及 RTK 定位系
统, 在具备测量水深功能的同时又具备应急打捞的能力, 并且成本低、 精度高、 操作简单, 这使得搭
载超声波探头的新型无人机在水深测量中极具发展潜力。
图 1 走航式 ADCP 测量水深现场图 图 2 两栖无人机测量水深样机
2 现代水深测量技术
2.1 无人船搭载测深仪技术 在实际应用场景中, 往往存在一些人工难以接近的测量水域。 因此, 近
年来无人测量技术得到了迅速发展。 特别是无人船技术, 凭借其高效和便捷的特点, 在水深测量领域
得到了广泛应用 [19-21] 。 无人船主要通过搭载测深系统进行测量, 该系统包括单波束测深仪或多波束测
深系统, 结合主机内置的全球导航卫星系统(Global Navigation Satellite System, GNSS)定位, 能够实时
获取水下高程数据 [22] 。 通过测量多个断面, 可以构建水下三维地形图, 一些无人船还可以通过水下摄
像头拍照进行水深识别 [23] 。
随着无人船技术的进步, 新一代无人船在测量水深时能够实现 10 cm 的超浅吃水, 避免了传统载
人船因吃水深度大而导致的测量精度下降问题。 无人船可采用碳纤维复合材料船体, 既坚固又耐用;
— 3 3 —