
Page 34 - 水利学报2025年第56卷第4期
P. 34
地识别摊铺区域的边界并进行划分。此外,涉及到摊铺和碾压作业同时进行的复杂工况,所提方法也有
较好表现。如图 7首行左侧组,此仓面右上角一台摊铺机正在平仓,左上和中上部两台碾压机正在碾压。
在摊铺作业区域,其区域形状呈块状,基本与实际情况相符。并且摊铺作业区域边缘划分情况良好,符
合现场实际施工状态;在碾压作业区域,由于碾压机采用错距法碾压施工,因此其区域呈条带状,符合
实际情况。此外,碾压作业区域划分良好,未碾压和已碾压区域划分清晰。图 7末行左侧组,此仓面在
同时进行摊铺和碾压作业。位于仓面上部的两台碾压机正在进行错距法碾压施工,其碾压轨迹在算法结
果中被清晰地识别。此外,中下部的摊铺区域与上部碾压区域之间的边界也有较清晰的划分。结果表明,
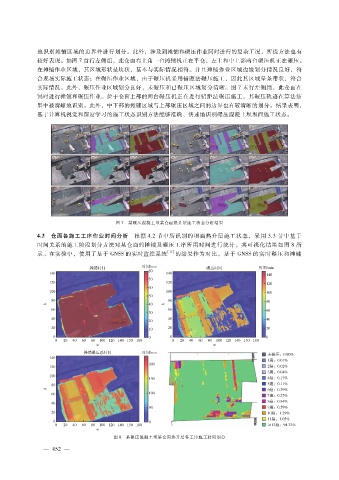
基于计算机视觉和深度学习的施工状态识别方法能够准确、快速地识别碾压混凝土坝坝面施工状态。
图 7 某碾压混凝土坝某仓面热升层施工状态分析结果
4.3 仓面各施工工序作业时间分析 根据 4.2节中所识别的坝面热升层施工状态,采用 3.3节中基于
时间关系的施工阶段划分方法对某仓面的摊铺及碾压工序所用时间进行统计。其可视化结果如图 8所
示。在实验中,使用了基于 GNSS的实时监控系统 [11] 的结果作为对比。基于 GNSS的实时碾压和摊铺
图 8 某碾压混凝土坝某仓面热升层各工序施工时间划分
— 4 5 —
2