
Page 123 - 2022年第53卷第6期
P. 123
还原后的信息与原始工况参数越相近,DAE的训练越充分,压缩效果越好。因此,训练 DAE直
至式( 3)中所示的损失函数 L最小:
m
h
L = ∑ w- w h′ 2 (3)
j
j
j =1
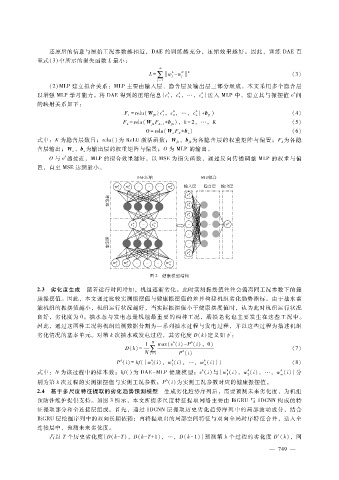
(2)MLP建立拟合关系:MLP主要由输入层、隐含层及输出层三部分组成,本文采用多个隐含层
h
h
h
h
以增强 MLP学习能力。将 DAE得到的压缩信息{c,c,…,c}送入 MLP中,建立其与振摆值 v间
n
2
1
的映射关系如下:
h
h
h
F = relu (W {c,c,…,c} + b) (4)
1 f1 1 2 n f1
F = relu (W F + b),k = 2 ,…,K (5)
k
fk
fk k - 1
O = relu (W F + b) (6)
o K
o
式中:K为隐含层数目;relu()为 ReLU激活函数;W 、b 为各隐含层的权重矩阵与偏置;F为各隐
fk fk k
含层输出;W 、b为输出层的权重矩阵与偏置;O为 MLP的输出。
o o
h
O与 v越接近,MLP的拟合效果越好,以 MSE为损失函数,通过反向传播调整 MLP的权重与偏
置,直至 MSE达到最小。
图 2 健康模型结构
2.3 劣化度生成 随着运行时间增加,机组逐渐劣化。此时实测振摆值往往会偏离同工况参数下的健
康振摆值。因此,本文通过比较实测振摆值与健康振摆值的差异构建机组劣化趋势指标。由于抽水蓄
能机组的振摆值越小,机组运行状况越好,当实际振摆值小于健康摆度值时,认为此时机组运行状况
良好,劣化度为 0。抽水态与发电态是机组最重要的两种工况,磨损老化也主要发生在这些工况中。
因此,通过这两种工况将机组监测数据分割为一系列抽水过程与发电过程,并以这些过程为描述机组
劣化情况的基本单元。对第 k次抽水或发电过程,其劣化度 D(k)定义如下:
k
k
1 N max(v(i) - P(i),0)
D(k) = ∑ k (7)
N i =1 P(i)
k
k
k
k
P(i) =hf({w(i),w(i),…,w (i)}) (8)
1 2 m
k
k
k
k
式中:N为该过程中的样本数;hf()为 DAE - MLP健康模型;v(i)与{w(i),w(i),…,w (i)}分
1
2
m
k
别为第 k次过程的实测振摆值与实测工况参数;P(i)为实测工况参数对应的健康振摆值。
2.4 基于多尺度特征提取的劣化趋势预测模型 生成劣化趋势序列后,需要预测未来劣化度,为机组
预防性维护提供支持。如图 3所示,本文所提多尺度特征提取网络主要由 BiGRU与 1DCNN构成的特
征提取部分和全连接层组成。首先,通过 1DCNN层提取历史劣化趋势序列中的局部波动成分,结合
BiGRU层挖掘序列中的双向长期依赖;再将提取出的局部空间特征与双向全局时序特征合并,送入全
连接层中,预测未来劣化度。
若以 T个历史劣化度{D(k - T),D(k - T + 1),…,D(k - 1)}预测第 k个过程的劣化度 D′(k),网
— 7 4 9 —