
Page 113 - 2023年第54卷第1期
P. 113
3
T= nL(ii- ii) (6)
sd rq
p m
sq rd
e
2
式中 n为磁极对数。
p
( 4)运动方程 [14]
J d ω ω r
= T - T- D ω (7)
n dt m e ω r
p
式中:J为转动惯量;T 为机械转矩;D为阻尼系数。
m
基于两相 d - q坐标体系下双馈异步电机定子端输出有功功率 P和无功功率 Q的计算表达式为 [15] :
s
s
3 3
P= (u i+ u i),Q = (u i- u i) (8)
sd sd
s
sd sq
sq sd
sq sq
s
2 2
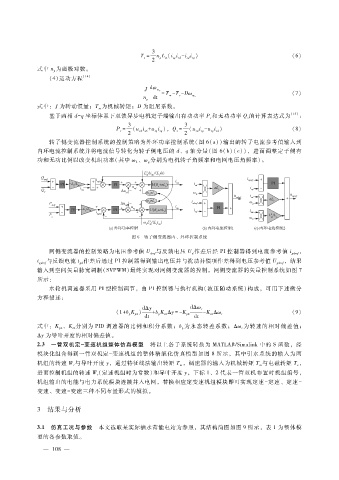
转子侧变流器控制系统的控制策略为外环功率控制系统(图 6(a))输出的转子电流参考值输入到
内环电流控制系统并将电流信号转化为转子侧电压的 d、q轴分量(图 6(b)(c)),进而调整定子侧有
分别为电机转子角频率和电网电压角频率)。
功和无功比例以改变机组功率(其中 ω 2 、ω g
图 6 转子侧变流器内、外环控制系统
网侧变流器的控制策略为电压参考值 U 与反馈电压 U 作差后经 PI控制器得到电流参考值 i ,
d
gdref
dref
i 与反馈电流 i作差后通过 PI控制器得到输出电压并与扰动补偿项作差得到电压参考值 U ,结果
gdref gd gdref
输入到空间矢量脉宽调制(SVPWM)最终实现对网侧变流器的控制。网侧变流器的矢量控制系统如图 7
所示:
水轮机调速器采用 PI型控制调节,由 PI控制器与执行机构(液压随动系统)构成,可用下述微分
方程描述:
d Δ y d Δω r
( 1 + bK ) + bK Δ y =- K - K Δω r (9)
p p2 p i2 p2 i2
dt dt
为转速的相对偏差值;
p2
i2
p
式中:K 、K 分别为 PID调速器的比例和积分系数;b为永态转差系数;Δω r
Δ y为导叶开度的相对偏差值。
2.3 一管双机定- 变速机组整体仿真模型 将以上各子系统转换为 MATLAB?Simulink中的 S函数,经
模块化组合得到一管双机定- 变速机组的整体精细化仿真模型如图 8所示,其中引水系统的输入为两
机组的转速 W 与导叶开度 y,通过特征线法输出转矩 T ,调速器的输入为机械转矩 T 与电磁转矩 T,
r m m e
进而控制机组的转速 W(定速机组时为常数)和导叶开度 y,下标 1、2代表一管双机布置时机组编号,
r
机组输出的电能与电力系统模块连接并入电网,替换相应定变速机组模块即可实现定速- 定速、定速-
变速、变速- 变速三种不同布置形式的模拟。
3 结果与分析
3.1 仿真工况与参数 本文选取某实际抽水蓄能电站为参照,其结构简图如图 9所示,表 1为整体模
型的各参数取值。
8
— 1 0 —