
Page 9 - 2023年第54卷第12期
P. 9
3 智能振冲控制模型与方法
3.1 控制模型 智能振冲控制模型 iVCM(IntelligentVibroflotationControlModel),以振冲施工过程中
的电流( I)、牵引力(T)、填料量(Q)、深度(D)和时间(t)作为振冲施工的控制指标,可概况为三区、
七阶段、五参数 I - T - Q - D - t和正常异常工况一体化控制。I - T - Q - D - t为 5个独立变量,采集质量要
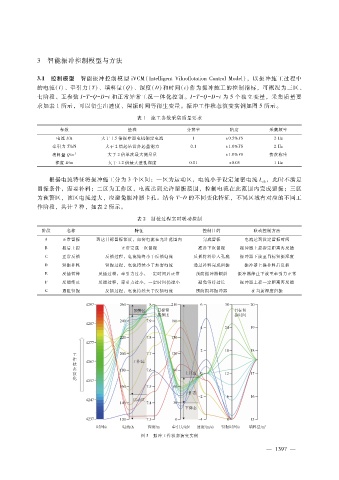
求如表 1所示,可以衍生出速度、留振时间等衍生变量。振冲工作状态演变实例如图 5所示。
表 1 施工参数采集质量要求
参数 量程 分辨率 精度 采集频率
电流 I?A 大于 1.5倍振冲器电机额定电流 1 ±0.5%FS 2Hz
牵引力 T?kN 大于 2倍起吊设备起重能力 0.1 ±1.0%FS 2Hz
填料量 Q?m 3 大于 2倍单次最大测量量 ±1.0%FS 按次称重
深度 D?m 大于 1.2倍最大造孔深度 0.01 ±0.05 1Hz
根据电流特征将振冲施工分为 3个区间:一区为运动区,电流小于设定加密电流 I ,此时不满足
vib
留振条件,需要补料;二区为工作区,电流达到允许留振范围,控制电流在此范围内完成留振;三区
为预警区,该区电流过大,应避免振冲器卡孔。结合 T - D的不同变化特征,不同区域有对应的不同工
作阶段,共计 7种,如表 2所示。
表 2 制桩过程实时联动控制
阶段 名称 特征 控制目的 联动控制方法
A 正常留振 到达目标留振深度,加密电流在允许范围内 完成留振 电流达到设定留振时间
B 振后上提 正常完成一次留振 准备下次留振 振冲器上提指定距离再反插
C 正常反插 反插过程,电流始终小于反插电流 反插将料带入孔底 振冲器下放至目标留振深度
D 留振补料 留振过程,电流持续小于加密电流 通过补料完成留振 振冲器上提补料后反插
E 反插暂停 反插过程,牵引力过小,一定时间后正常 预防振冲器倾斜 振冲器停止下放至牵引力正常
F 反插终止 反插过程,牵引力过小,一定时间仍过小 避免等待过长 振冲器上提一定距离再反插
G 遇阻留振 反插过程,电流持续大于反插电流 预防损坏振冲器 在当前深度留振
图 5 振冲工作状态演变实例
3
— 1 9 7 —