
Page 11 - 2023年第54卷第12期
P. 11
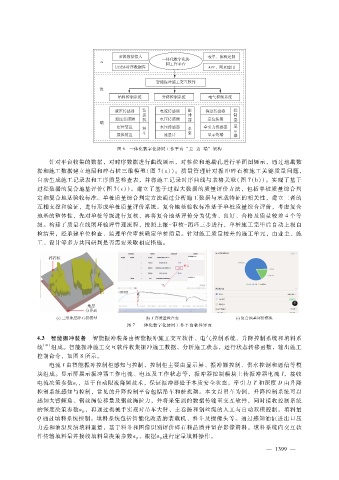
图 6 一体化数字化协同工作平台 “云- 边- 端” 架构
针对平台收集的数据,对时序数据进行曲线展示,对桩位和地勘孔进行平面图展示,通过地勘数
据和施工数据建立地层和碎石桩三维模型(图 7(a))。质量管理针对振冲碎石桩施工关键质量问题,
自动生成施工记录表和工序质量检查表,并将施工记录时序曲线与表格关联(图 7(b))。实现了基于
过程数据的复合地基评价(图 7(c))。建立了基于过程大数据的质量评价方法,包括单桩质量综合判
定和复合地基验收标准。单桩质量综合判定方法通过分析施工数据与承载特征的相关性,建立二者的
互相支撑和验证,进行形成单桩质量评价系统。复合地基验收标准基于单桩质量综合评价,考虑复合
地基的整体性,先对单桩等级进行复核,再将复合地基评价分为优秀、良好、合格及质量较差 4个等
级。构建了质量在线闭环验评管理流程,按照上报- 审核- 闭环三步进行,单桩施工完毕后自动上报自
检结果,经承建单位检查、监理单位审核确定单桩质量。针对施工质量较差的施工单元,由业主、施
工、设计等多方共同研判是否需要采取相应措施。
图 7 一体化数字化协同工作平台软件界面
4.3 智能振冲装备 智能振冲装备由智能振冲施工交互软件、电气控制系统、升降控制系统和填料系
统 [21] 组成。智能振冲施工交互软件收集振冲施工数据,分析施工状态,运行状态转移函数,输出施工
控制命令,如图 8所示。
电流 I由智能振冲控制柜感知与控制,控制柜主要由显示屏、振冲器控制、供水控制和通信等模
块组成。显示屏展示振冲器工作电流、电压及工作状态等,振冲器控制模块上传振冲器电流 I,接收
电流决策参数a,基于自动限流降频技术,保证振冲器处于本质安全状态。牵引力 T和深度 D由升降
I
控制系统感知与控制,常见的升降控制平台包括吊车和桩机架。本文以吊车为例,升降控制系统可以
感知大臂倾角、钢丝绳位移量及钢丝绳拉力,并将采集到的数据传输至交互软件,同时接收控制系统
的深度决策参数a,再通过机械手实现对吊车大臂、主卷扬和钢丝绳的人工与自动双模控制。填料量
D
Q通过填料系统控制。填料系统包括智能化改造的装载机、料斗及摄像头等。通过感知油缸进出口压
力差和油温反演填料重量,基于料斗和图像识别评价碎石料品质并留存影像资料。填料系统向交互软
件传输填料量并接收填料量决策参数a,根据a进行定量填料操作。
Q
Q
3
— 1 9 9 —