
Page 102 - 2025年第56卷第5期
P. 102
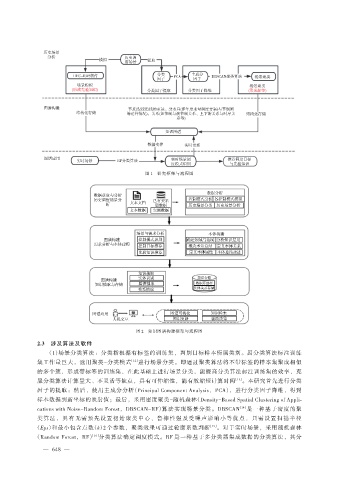
图 1 研究框架与流程图
图 2 知识图谱构建框架与流程图
2.3 涉及算法及软件
(1)场景分类算法:分类指根据有标签的训练集,判别目标样本所属类别。因分类算法标注训练
集工作量巨大,选用聚类-分类模式 [12] 进行场景分类。即通过聚类算法将不带标签的样本集聚成相似
的多个簇,形成带标签的训练集,在此基础上进行场景分类,能提高分类算法标注训练集的效率,克
服分类算法计算量大、不灵活等缺点,具有可伸缩性,能有效缩短计算时间 [13] 。本研究首先进行分类
因子的提取;然后,使用主成分分析(Principal Component Analysis,PCA),进行分类因子降维,得到
样本数据到新坐标的映射值;最后,采用密度聚类-随机森林(Density-Based Spatial Clustering of Appli⁃
[14]
cations with Noise-Random Forest,DBSCAN-RF)算法实现场景分类。DBSCAN 是一种基于密度的聚
类算法,具有无需预先设置初始聚类中心、鲁棒性强及受噪声影响小等优点,只需设置扫描半径
(Eps)和最小包含点数(k)2 个参数,聚类效果可通过轮廓系数判断 [15] 。对于实时场景,采用随机森林
(Random Forest,RF) 分类算法确定调度模式。RF 是一种基于多分类器集成数据的分类算法,其分
[16]
— 648 —