
Page 115 - 2023年第54卷第4期
P. 115
处,X和 X动力学结构一样,但 X发生了数值突变,此时 Q = 0,R>0。当 u值从 3.5增加至 3.74时,
1 2 2
Logistic时间序列将从四周期逐渐变为五周期状态,动力学结构也逐渐发生改变;在 215—285处,X
1
和 X的动力学结构差异还不显著,对应的 Q指数和 R指数均大于 0,但处于很低的水平;在 315—385
2
处,四周期序列 X与五周期序列 X的动力学结构明显不同,此时的 Q指数和 R指数较 215—285处也
2
1
较大。可以看出利用 Q指数和 R指数可以有效地反映出系统间动力学结构差异和动力学距离。
3 工程案例
3.1 工程概况 本文以南水北调东线工程某泵站枢纽为例,该泵站枢纽由泵站、挡洪闸、进水闸、引
3
河等工程设施组成,主要功能为联合调水及区域排涝。泵站设计流量 150m ?s,调水期设计扬程 6.0m,
3
排涝期设计扬程 6.6m,安装立式全调节混流泵 5台,单机设计流量 37.5m ?s,配套电机功率 3550kW,
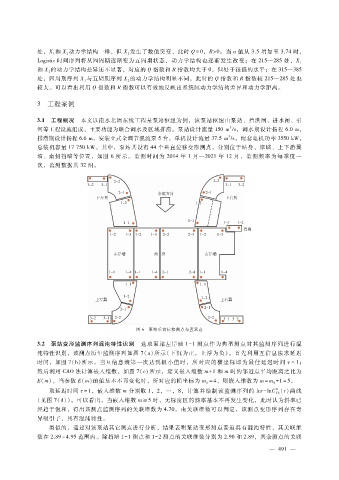
总装机容量 17750kW。其中,泵站共设有 44个垂直位移变形测点,分别位于站身、岸墙、上下游翼
墙、南侧挡墙等位置,如图 6所示。监测时间为 2014年 1月—2021年 12月,监测频率为每季度一
次,监测数据共 32组。
图 6 泵站垂直位移测点布置示意
3.2 泵站变形监测序列混沌特性识别 选取泵站左岸墙 1 - 1测点作为典型测点对其监测序列进行混
沌特性识别,该测点历年监测序列如图 7(a)所示(下沉为正,上浮为负)。首先利用互信息法求延迟
时间,如图 7(b)所示,当互信息熵第一次达到极小值时,所对应的横坐标即为最佳延迟时间 τ = 1;
然后利用 CAO法计算嵌入维数,如图 7(c)所示,定义嵌入维数 m + 1和 m时的邻近点平均距离之比为
E(m),当参数 E(m)的值基本不再变化时,所对应的横坐标为 m = 4,则嵌入维数为 m= m + 1 = 5。
0
0
m
取延迟时间 τ = 1 ,嵌入维数 m分别取 1,2,…,8,计算并绘制该监测序列的 lnr - ln C (r)曲线
XX
(见图 7(d))。可以看出,当嵌入维数 m ≥5时,无标度区的斜率基本不再发生变化,此时认为斜率已
经趋于饱和,得出该测点监测序列的关联维数为 4.70。由关联维数可以判定,该测点变形序列存在奇
异吸引子,具有混沌特性。
类似的,通过对该泵站其它测点进行分析,结果表明泵站变形测点普遍具有混沌特性,其关联维
数在 2.89~4.95范围内。除挡墙 1 - 1测点和 1 - 2测点的关联维数分别为 2.90和 2.89,其余测点的关联
— 4 9 1 —