
Page 125 - 2023年第54卷第9期
P. 125
式中:σ为空化数;p为饱和蒸气压;v为来流速度。
v
3 计算设置
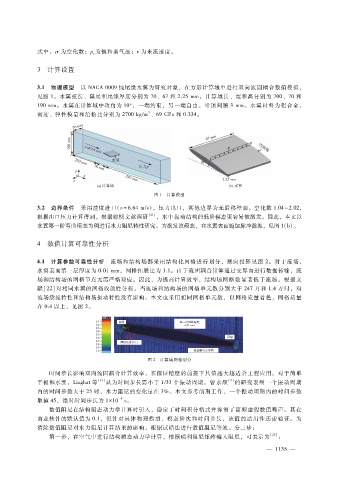
3.1 物理模型 以 NACA0009钝尾缘水翼为研究对象,在方形计算域中进行双向流固耦合数值模拟,
见图 1。水翼弦长、翼展和尾缘厚度分别为 70、67和 2.25mm,计算域长、宽和高分别为 700、70和
190mm。水翼在计算域中攻角为 10°,一端约束,另一端自由,叶顶间隙 3mm。水翼材料为铝合金,
3
密度、弹性模量和泊松比分别为 2700kg?m 、69GPa和 0.334。
图 1 计算模型
3.2 边界条件 采用速度进口(v = 6.64m?s ),压力出口,其他边界为无滑移壁面。空化数 1.04~2.02,
根据出口压力计算得到。根据前期文献调研 [21] ,水中振动结构的低阶模态更容易被激发。因此,本文以
水翼第一阶弯曲模态为例进行水力阻尼特性研究。为激发该模态,在水翼表面施加脉冲激振,见图 1(b)。
4 数值计算可靠性分析
4.1 计算参数可靠性分析 流场和结构场都采用结构化网格进行划分,展向投影见图 2。对于流场,
水翼表面第一层厚度为 0.01mm,网格拓展比为 1.1。由于流固耦合计算通过交界面进行数据传输,流
场和结构场的网格节点无需严格对应。因此,为提高计算效率,结构场网格数显著低于流场。根据文
献[ 22]对相同水翼的网格收敛性分析,当流场和结构场的网格单元数分别大于 247万和 1.4万时,对
流场绕流特性和结构场振动特性没有影响。本文也采用相同网格单元数,以网格质量着色,网格质量
在 0.4以上,见图 2。
图 2 计算域网格划分
时间步长影响双向流固耦合计算效率,在保证精度的前提下其值越大越适合工程应用。对于简单
平板和水翼,Liaghat等 [19] 认为时间步长需小于 1?33个振动周期。曾永顺 [9] 的研究表明一个振动周期
内的时间步数大于 25时,水力阻尼的变化量在 3%。本文参考前期工作,一个振动周期内的时间步数
- 4
取值 45,绝对时间步长为 1 × 10 s。
数值阻尼在结构瞬态动力学计算时引入,稳定了时间积分格式并抑制了高频虚假数值噪声。其在
商业软件的默认值为 0.1,但针对具体物理模型、模态阶次和时间步长,该值的适用性还需验证。为
消除数值阻尼对水力阻尼计算结果的影响,根据试错法进行数值阻尼等效。分三步:
第一步,在空气中进行结构瞬态动力学计算,根据瑞利阻尼矩阵输入阻尼,可表示为 [23] :
1
— 1 3 5 —