
Page 127 - 2024年第55卷第5期
P. 127
性。该电站孤网模式下数据如表 1示。
表 1 某水电站 HTRS参数
子系统 参数
=
=
=
PID控制器 K P 2.8,K I 0.2,K D 0
=
随动系统 T y 0.4594
3
=
=
=
=
水轮机 D= 6.223m,H r 197m,最大水头 H max 229.4m,最小水头 H min 154.6m,Q r 432.7m ?s
=
引水系统 T w 1.29
=
=
=
发电机 T a 12.239 ,e g 0.176 ,X r 125
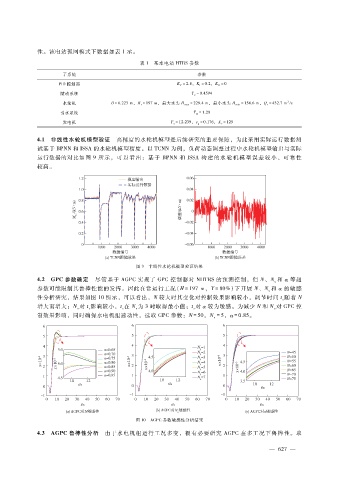
4.1 非线性水轮机模型验证 高精度的水轮机模型是后续研究的重要保障,为此采用实际运行数据测
试基于 BPNN和 ISSA的水轮机模型精度。以 TCNN为例,负荷动态调整过程中水轮机模型输出与实际
运行数据的对比如图 9所 示,可 以看 出:基于 BPNN和 ISSA构 建 的水 轮 机 模型 误差 较小、可靠性
较高。
图 9 非线性水轮机模型验证结果
4.2 GPC参数确定 尽管基于 AGPC实现了 GPC控制器对 NHTRS的预测控制,但 N、N 和 α等超
u
参数可能限制其鲁棒性能的发挥。因此在常运行工况(H= 197m,Y = 80%)下开展 N、N 和 α的敏感
u
性分析研究,结果如图 10所示,可以看出,N较大时其变化对控制效果影响较小,调节时间 t随着 N
s
增大而增大;N对 t影响较小,t在 N 为 3时取得最小值;t对 α较为敏感。为减少 N和 N 对 GPC控
u s s u s u
制效果影响,同时确保水电机组速动性,选取 GPC参数:N = 50,N = 5,α = 0.85。
u
图 10 AGPC参数敏感性分析结果
4.3 AGPC鲁棒性分析 由于水电机组运行工况多变,极有必要研究 AGPC在多工况下鲁棒性。取
— 6 2 7 —