
Page 122 - 2024年第55卷第5期
P. 122
水轮机转速;m、x、y、q和 h分别表示 M、X、Y、Q和 H的偏差相对值;M 、X、Y、Q 和 H 分
t t 0 0 0 0 0
别为 M、X、Y、Q和 H的初始值;H、X、M 和 Q 分别为 H、X、M 和 Q的额定值。
t r r r r t
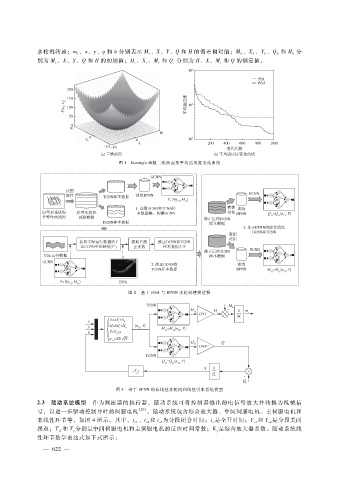
图 1 Rastrigin函数三维曲面及平均适应度变化曲线
图 2 基于 ISSA与 BPNN水轮机建模过程
图 3 基于 BPNN的非线性水轮机和线性引水系统模型
2.3 随动系统模型 作为调速器的执行器,随动系统可将控制器输出的电信号放大并转换为机械信
号,以进一步驱动控制导叶的伺服电机 [20] 。随动系统包含综合放大器、中间伺服电机、主伺服电机和
非线性环节等,如图 4所示。其中,t、t和 t为分段闭合时间;t是全开时间;Y 和 Y 是分段关闭
c1 c2 c3 o c1 c2
拐点;T 和 T分别是中间伺服电机和主伺服电机的反应时间常数;K是综合放大器系数。随动系统线
y
y1
y
性环节数学表达式如下式所示:
— 6 2 —
2