
Page 125 - 2024年第55卷第5期
P. 125
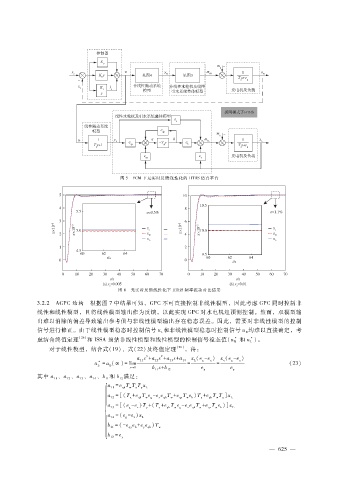
图 5 FCM下无实时反馈线性化的 HTRS仿真平台
图 6 无实时反馈线性化下 HTRS频率扰动对比结果
3.2.2 AGPC结构 根据图 7中结果可知,GPC不可直接控制非线性模型,因此考虑 GPC同时控制非
线性和线性模型,且将线性模型输出作为反馈,以此实现 GPC对水电机组预测控制。然而,双模型输
出难以消除的偏差导致输出参考值与非线性模型输出存在稳态误差。因此,需要对非线性模型的控制
信号进行修正。由于线性模型稳态时控制信号 u和非线性模型稳态时控制信号 u均难以直接确定,考
N
L
虑结合终值定理 [26] 和 ISSA预估非线性模型和线性模型的控制信号稳态值(u 和 u )。
N L
对于线性模型,结合式(19)、式(22)及终值定理 [26] ,得:
2
3
a s + a s + a s + a 14 x(e - e) x(e - e)
g
x
c
L
12
11
13
x
g
u = u( ∞) =lim = = (23)
L
L
s → 0 b s + b e e
11 12 y y
其中 a 、a 、a 、a 、b 和 b 满足:
11
11
13
12
14
12
a = e TTTx
11
qh w
a y L
a = [(T+ e Te - ee T+ eTe)T+ e TT]x
12
y
a
L
qh w
qx w h
x qh w
a
qh w g
a = [(e - e)T+ (T+ e Te - ee T+ eTe)]x
13 g x y a qh w g x qh w qx w h L
a = (e - e)x
L
x
g
14
b = ( - ee+ ee )T
11 qy h y qh w
b = e
12 y
— 6 2 5 —