
Page 123 - 2024年第55卷第5期
P. 123
y K y
G(s) = = (11)
e 2
u T Ts + Ts + K
y1 y y y
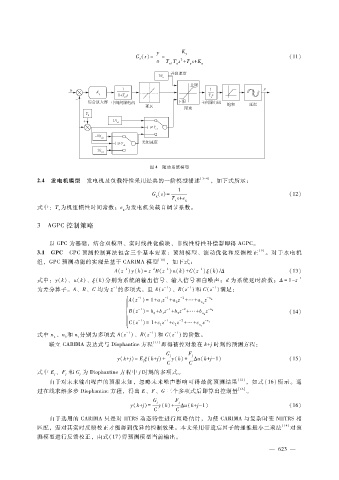
图 4 随动系统模型
2.4 发电机模型 发电机及负载特性采用经典的一阶模型描述 [3 - 4] ,如下式所示:
1
G(s) = (12)
g
Ts + e
a g
式中:T为机组惯性时间常数;e为发电机负载自调节系数。
a g
3 AGPC控制策略
以 GPC为基础,结合双模型、实时线性化模块、非线性特性补偿器即得 AGPC。
3.1 GPC GPC预测控制算法包含三个基本要素:预测模型、滚动优化和反馈校正 [9] 。对于水电机
组,GPC预测功能的实现是基于 CARIMA模型 [10] ,如下式:
- 1 - d - 1 - 1
A(z )y(k) =z B(z )u(k) + C(z ) ξ (k)? Δ (13)
- 1
式中:y(k)、u(k)、ξ (k)分别为系统的输出信号、输入信号和白噪声;d为系统延时阶数;Δ = 1 - z
- 1
- 1
- 1
- 1
为差分算子。A、B、C均为 z 的多项式,且 A(z )、B(z )和 C(z )满足:
- 1
- 2
- 1
A(z ) =1 + az + az + …+ a z
- n a
2
1
n a
- 1 - 1 - 2 - n b
B(z ) =b+ bz + bz + …+ b z (14)
0 1 2 n b
- 2
- 1
- 1
C(z ) =1 + cz + cz + …+ cz
- n c
1 2 n c
- 1
- 1
- 1
式中 n、n和 n分别为多项式 A(z )、B(z )和 C(z )的阶数。
c
b
a
联立 CARIMA表达式与 Diophantine方程 [11] 即得被控对象在 k + j时刻的预测方程:
G j F j
y(k + j) =Eξ (k + j) + y(k) + Δ u(k + j - 1) (15)
j
C C
式中 E、F 和 G 为 Diophantine方程中 j时刻的多项式。
j j j
由于对未来输出噪声的预报未知,忽略未来噪声影响可得最优预测结果 [12] ,如式(16)所示。通
过在线求解多步 Diophantine方程,得出 E、F、G三个多项式后即算出控制量 [13] 。
G j F j
y(k + j) = y(k) + Δ u(k + j - 1 ) (16)
C C
由于选用的 CARIMA只是对 HTRS动态特性进行粗略估计,为使 CARIMA与复杂时变 NHTRS相
匹配,需对其实时反馈校正才能得到优异的控制效果。本文采用带遗忘因子的递推最小二乘法 [14] 对预
测模型进行反馈校正,由式(17)得预测模型当前输出。
— 6 2 3 —