
Page 14 - 2022年第53卷第6期
P. 14
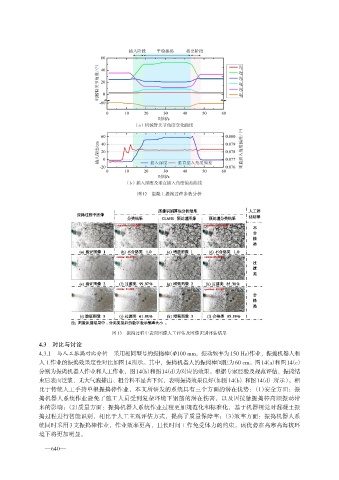
图12 混凝土振捣过程参数分析
图13 振捣过程中表面图像人工评估及图像识别评估结果
4.3 对比与讨论
4.3.1 与人工振捣对比分析 采用相同型号的振捣棒(Φ100 mm,振动频率为150 Hz)作业,振捣机器人和
人工作业的振捣效果定性对比如图14所示。其中,振捣机器人的振捣棒间距为60 cm。图14(a)和图14(c)
分别为振捣机器人作业和人工作业,图14(b)和图14(d)为对应的效果。根据专家经验及规范评估,振捣结
束后表面泛浆、无大气泡排出、粗骨料不显著下沉,表明振捣效果良好(如图14(b)和图14(d)所示)。相
比于传统人工手持单根振捣棒作业,本文所研发的系统具有三个方面的潜在优势:(1)安全方面:振
捣机器人系统作业避免了施工人员受到复杂环境下钢筋的潜在伤害,以及因接触振捣棒高频振动带
来的影响;(2)质量方面:振捣机器人系统作业过程更加规范化和标准化,基于机器视觉对混凝土振
捣过程进行智能识别,相比于人工主观评估方式,提高了质量保障率;(3)效率方面:振捣机器人系
统同时采用3支振捣棒作业,作业效率更高,且长时间工作免受体力的约束,该优势在高寒高海拔环
境下将更加明显。
—640 —