
Page 15 - 2022年第53卷第6期
P. 15
(a) 振捣机器人振捣作业;(b) 振捣机器人振捣效果;(c) 人工振捣作业;(d) 人工振捣效果
图14 振捣机器人系统与人工振捣作业效果对比
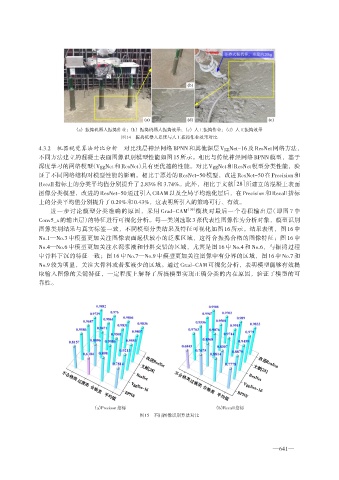
4.3.2 机器视觉算法对比分析 对比浅层神经网络 BPNN 和其他深层 VggNet-16 及 ResNet 网络方法,
不同方法建立的混凝土表面图像识别模型性能如图 15 所示。相比与传统神经网络 BPNN 模型,基于
深度学习的网络模型(VggNet 和 ResNet)具有更优越的性能。对比 VggNet 和 ResNet 模型分类性能,验
证了不同网络结构对模型性能的影响。相比于原始的 ResNet-50 模型,改进 ResNet-50 在 Precision 和
Recall 指标上的分类平均值分别提升了 2.83% 和 3.74%。此外,相比于文献 [28] 所建立的混凝土表面
图像分类模型,改进的 ResNet-50 通过引入 CBAM 以及全局平均池化层后,在 Precision 和 Recall 指标
上的分类平均值分别提升了0.29%和0.43%,这表明所引入的策略可行、有效。
[36]
进一步讨论模型分类准确的原因,采用 Grad-CAM 模块对最后一个卷积输出层(即图 7 中
Conv5_x 的输出层)的特征进行可视化分析。每一类别选取 3 张代表性图像作为分析对象,模型识别
图像类别结果与真实标签一致,不同模型分类结果及特征可视化如图 16 所示。结果表明,图 16 中
No.1—No.3 中模型更加关注图像表面起伏较小的泛浆区域,这符合振捣合格的图像特征;图 16 中
No.4—No.6 中模型更加关注水泥浆液和骨料交错的区域,尤其是图 16 中 No.4 和 No.6,与振捣过程
中骨料下沉的特征一致;图 16 中 No.7—No.9 中模型更加关注图像中有分界的区域,图 16 中 No.7 和
No.9 较为明显,关注大骨料或者浆液少的区域。通过 Grad-CAM 可视化分析,表明模型能够有效提
取输入图像的关键特征,一定程度上解释了所提模型实现正确分类的内在原因,验证了模型的可
靠性。
(a)Precison指标 (b)Recall指标
图15 不同图像识别算法对比
—641 —