
Page 16 - 2022年第53卷第6期
P. 16
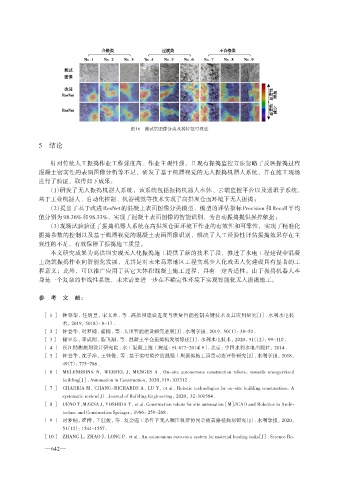
图16 测试集图像分类及其特征可视化
5 结论
针对传统人工振捣作业工作强度高、作业主观性强,且现有振捣监控方法忽略了反映振捣过程
混凝土密实性的表面图像分析等不足,研发了基于机器视觉的无人振捣机器人系统,并在施工现场
进行了验证,取得如下成果:
(1)研发了无人振捣机器人系统,该系统包括振捣机器人本体、云端监控平台以及通讯子系统,
基于工业机器人、自动化控制、机器视觉等技术实现了高拱坝仓面环境下无人振捣;
(2)提出了基于改进 ResNet 的混凝土表面图像分类模型,模型的评估指标 Precision 和 Recall 平均
值分别为98.36%和98.33%,实现了混凝土表面图像的智能识别,为自动振捣提供操控依据;
(3)现场试验验证了振捣机器人系统在高拱坝仓面环境下作业的有效性和可靠性,实现了精准化
振捣参数的控制以及基于机器视觉的混凝土表面图像识别,解决了人工经验性评估振捣效果存在主
观性的不足,有效保障了振捣施工质量。
本文研究成果为高拱坝实现无人化振捣施工提供了新的技术手段,推进了水电工程建设中混凝
土浇筑振捣作业向智能化发展,尤其是对未来高寒地区工程实现少人化或无人化建设具有显著的工
程意义;此外,可以推广应用于其它大体积混凝土施工过程,具有一定普适性。由于振捣机器人本
身是一个复杂的非线性系统,未来需要进一步在不确定性环境下实现智能化无人振捣施工。
参 考 文 献:
[ 1 ] 钟登华,任炳昱,宋文帅,等 . 高拱坝建设进度与质量智能控制关键技术及其应用研究[J]. 水利水电技
术,2019,50(8):8-17 .
[ 2 ] 钟登华,时梦楠,崔博,等 . 大坝智能建设研究进展[J]. 水利学报,2019,50(1):38-52 .
[ 3] 储亚东,李成刚,陈飞翔,等 . 混凝土平仓振捣机发展综述[J]. 水利水电技术,2020,51(12):99-110 .
[ 4 ] 长江勘测规划设计研究院 . 水工混凝土施工规范:SL 677-2014[S]. 北京:中国水利水电出版社,2014 .
[ 5 ] 钟登华,沈子洋,王佳俊,等 . 基于实时监控的混凝土坝振捣施工质量动态评价研究[J]. 水利学报,2018,
49(7):775-786 .
[ 6 ] MELENBRINK N,WERFEL J,MENGES A . On-site autonomous construction robots:towards unsupervised
building[J]. Automation in Construction,2020,119:103312 .
[ 7 ] GHARBIA M,CHANG-RICHARDS A,LU Y,et al . Robotic technologies for on-site building construction:A
systematic review[J]. Journal of Building Engineering,2020,32:101584 .
[ 8 ] UENO T,MAESA J,YOSHIDA T,et al. Construction robots for site automation[M]/CAD and Robotics in Archi⁃
/
tecture and Construction Springer,1986:259-268 .
[ 9 ] 时梦楠,崔博,王佳俊,等 . 复杂施工条件下无人碾压机群协同全覆盖路径规划研究[J]. 水利学报,2020,
51(12):1544-1557 .
[10] ZHANG L,ZHAO J,LONG P,et al . An autonomous excavator system for material loading tasks[J]. Science Ro⁃
—642 —