
Page 12 - 2022年第53卷第6期
P. 12
3.2 混凝土表面图像识别模型的建立 在建筑施工领域,尚无开源的混凝土振捣表面图像数据集。
因此,本文通过现场拍摄混凝土振捣过程中表面图像,通过归纳总结其演变特征,将其划分为3个阶
段,即混凝土表面图像分为不合格类、过渡类以及合格类3个类别。建立的混凝土表面图像数据集中
不合格类、过渡类和合格类图像数量分别为 5056、4476和 5474张,共计 10 056张图像。本文将数据
集随机划分为训练样本和测试样本,二者比例分别为0.85和0.15。模型训练参数如下:训练200个迭代
轮次(即完整数据集输入模型训练的过程);采用 SGD 优化算法,初始学习率和动量分别为 0.001 和
0.9;批处理大小为 32。运行物理环境为 Ubuntu 16.04操作系统,GPU 显卡型号为 NVIDIA TITAN XP,
运行内存128 GB。基于Keras框架进行模型的训练。
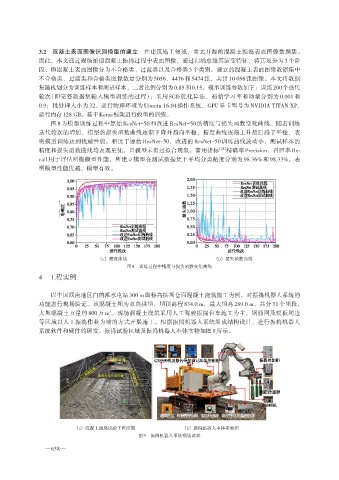
图 8 为模型训练过程中原始 ResNet-50 和改进 ResNet-50 的精度与损失函数变化曲线。随着训练
迭代轮次的增加,模型的损失函数曲线逐渐下降并趋向平稳,精度曲线逐渐上升最后趋于平稳,表
明模型训练达到优越性能。相比于原始 ResNet-50,改进的 ResNet-50 训练曲线波动小,测试样本的
精度和损失函数曲线均表现更优,且模型未有过拟合现象。常用指标 [28] 精确率 Precision、召回率 Re⁃
call 用于评估所提模型性能,所建立模型在测试数据集上平均分类精度分别为 98.36% 和 98.33%,表
明模型性能优越,模型有效。
(a) 精度曲线 (b) 损失函数曲线
图8 训练过程中精度与损失函数变化曲线
4 工程实例
以中国西南地区白鹤滩水电站300 m级特高拱坝仓面混凝土浇筑施工为例,对振捣机器人系统的
功能进行现场验证。该混凝土坝为双曲拱坝,坝顶高程 834.0 m,最大坝高 289.0 m,共分 31个坝段,
大坝混凝土方量约 800 万 m 。现场混凝土浇筑采用人工驾驶振捣台车施工为主,钢筋网及模板周边
3
等区域以人工振捣作业为辅的方式开展施工。根据振捣机器人系统组成结构设计,进行振捣机器人
系统软件和硬件的研发,振捣试验区域及振捣机器人本体实物如图9所示。
(a) 混凝土振捣试验工程面貌 (b) 振捣机器人本体实物图
图9 振捣机器人系统现场试验
—638 —