
Page 85 - 水利学报2025年第56卷第4期
P. 85
(1)当前馈控制和反馈控制对流量的调节方向一致时(都增大流量或都减小流量),复合控制调节
量取两者中绝对值较大的流量调节量,避免流量调节过度引起水位超调。
(2)当前馈控制和反馈控制对流量的调节方向不一致时,复合控制的调节方向与反馈控制一致,
以优先消除当前偏差,复合控制调节量大小取决于两者的代数和,兼顾对冲效果。
u = [u ,u ,…,u ] T (11)
com com,1 com,2 com,N
u + u ,
{ pre,i fb,i u × u ≤0
pre,i
fb,i
u = u (12)
com,i fb,i max( u , u ), u × u >0
u pre,i fb,i pre,i fb,i
fb,i
3
式中:u 为控制算法前反馈混合调节流量(向量),m ?s;u com,i 为第 i个渠池上游闸门的混合调节流
com
3
量(标量),m ?s;N为渠道系统包含的渠池个数;u 和 u 分别为渠池 i上游闸门的前馈调节流量和
pre,i fb,i
3
反馈调节流量(均为标量),m ?s。
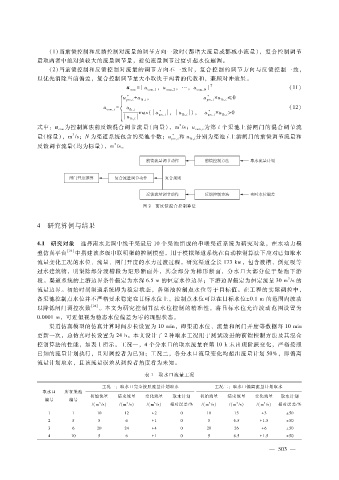
图 2 前反馈混合控制算法
4 研究算例与结果
4.1 研究对象 选择南水北调中线干渠最后 10个渠池组成的串联渠道系统为研究对象,在水动力模
型仿真平台 [23] 中搭建该多级串联明渠的控制模型,用于模拟渠道系统在自动控制算法下应对已知取水
流量变化工况的水位、流量、闸门开度的水力过渡过程。研究渠道全长 173km,包含渡槽、倒虹吸等
过水建筑物,明渠除部分渡槽段为矩形断面外,其余部分为梯形断面,分水口大部分位于渠池下游
3
段。渠道系统的上游边界条件假定为水深 6.5m的恒定水位边界;下游边界假定为恒定流量 30m ?s的
流量边界。初始时刻渠道系统即为稳定状态,各渠池控制点水位等于目标值。在工程的实际调控中,
各渠池控制点水位并不严格要求稳定在目标水位上,控制点水位可以在目标水位±0.1m的范围内波动
以降低闸门调控次数 [24] 。本文为研究控制算法水位控制的精准性,将目标水位允许波动范围设置为
0.0001m,可近似视为稳态水位偏差为零的理想状态。
渠道仿真模型的仿真计算时间步长设置为 10min,即渠道水位、流量和闸门开度等数据每 10min
更新一次,总仿真时长设置为 24h。本文设计了 2种取水工况用于测试改进的前馈控制方法及其混合
控制算法的性能,如表 1所示。工况一,4个分水口的取水流量在第 10h末出现阶跃变化,严格按照
已知的流量计划执行,且对调控者为已知;工况二,各分水口流量变化均超出流量计划 50%,即偏离
流量计划取水,且该流量误差从调控者角度看为未知。
表 1 取水口流量工况
工况一:取水口完全按照流量计划取水 工况二:取水口偏离流量计划取水
取水口 所在渠池
初始流量 结束流量 变化流量 取水计划 初始流量 结束流量 变化流量 取水计划
编号 编号
3
3
3
3
3
3
?(m ?s) ?(m ?s) ?(m ?s) 相对误差?% ?(m ?s) ?(m ?s) ?(m ?s) 相对误差?%
1 1 10 12 + 2 0 10 13 + 3 ±50
2 5 5 6 + 1 0 5 6.5 + 1.5 ±50
3 6 20 24 + 4 0 20 26 + 6 ±50
4 10 5 6 + 1 0 5 6.5 + 1.5 ±50
— 5 0 3 —