
Page 62 - 2025年第56卷第5期
P. 62
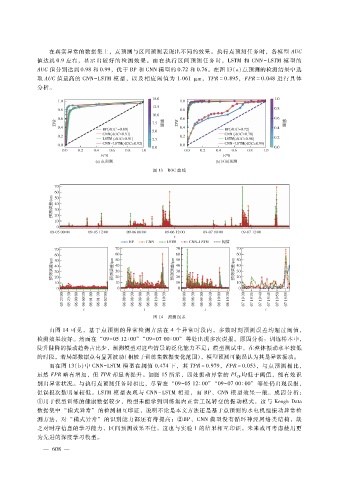
在真实异常的数据集上,点预测与区间预测表现出不同的效果。执行点预测任务时,各模型 AUC
值达到 0.9左右,显示出较好的检测效果。而在执行区间预测任务时,LSTM 和 CNN - LSTM 模型的
AUC值分别达到 0.98和 0.99,优于 BP和 CNN模型的 0.72和 0.76。在图 13(a)点预测的检测结果中选
取 AUC值最高的 CNN - LSTM 模型,以及相应阈值为 1.061μ m,TPR= 0.895 ,FPR= 0.048进行具体
分析。
图 13 ROC曲线
图 14 预测误差
由图 14可见,基于点预测的异常检测方法在 4个异常时段内,多数时刻预测误差均超过阈值,
检测效果较好。然而在 “ 09 - 0512∶00” “09 - 0700∶00” 等处出现多次误报。原因分析:训练样本中,
陡升陡降的振动趋势占比少,预测模型对这些情景的泛化能力不足;模型测试中,在整体振动水平较低
的时段,若局部数据点有显著波动(相较于训练集数据变化范围),模型预测可能误认为其是异常振动。
而在图 13(b)中 CNN - LSTM模型在阈值 0.474下,其 TPR = 0.979,FPR = 0.053,与点预测相比,
虽然 FPR略有增加,但 TPR却显著提升。如图 15所示,四处振动异常的 PI 均低于阈值,能有效识
CP
别出异常状况。与执行点预测任务时相比,尽管在 “ 09 - 0512∶00” “09 - 0700∶00” 等处仍出现误报,
但误报次数明显较低。LSTM 模型表现与 CNN - LSTM 相近,而 BP、CNN模型效果一般。成因分析:
①用于模型训练的健康数据较少,模型未能学到训练集内正常工况转变的振动模式,这与 KeoghData
数据集中 “模式异常” 的检测相互印证,说明不论是本文方法还是基于点预测的水电机组振动异常检
测方法,对 “模式异常” 的识别能力都还有待提高;②BP、CNN模型没有循环神经网络类结构,缺
乏对时序信息的学习能力,区间预测效果不佳,这也与实验 1的结果相互印证。未来或可考虑使用更
为先进的深度学习模型。
— 6 0 —
8