
Page 17 - 水利学报2025年第56卷第3期
P. 17
响应速度较慢、趋稳时间较长。
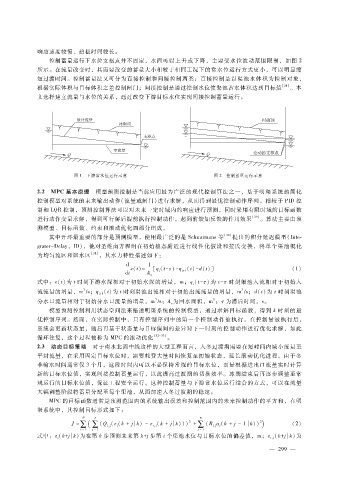
控制蓄量运行下水位支枢点并不固定,水面可以上升或下降,主要受水位波动范围限制,如图 2
所示。在流量改变时,其需要改变的蓄量大小相较于相同工况下的常水位运行方式更小,可以明显缩
短过渡时间。控制蓄量法又可分为直接控制和间接控制两类:直接控制是以渠池水体积为控制对象,
根据实际体积与目标体积之差控制闸门;间接控制是通过控制水位使渠池蓄水体积达到目标值 [28] 。本
文选择建立流量与水位的关系,通过改变下游目标水位实现间接控制蓄量运行。
图 1 下游常水位运行示意 图 2 控制蓄量运行示意
2.2 MPC基本原理 模型预测控制是当前应用最为广泛的现代控制算法之一,基于明渠系统的简化
控制模型对系统的未来输出动作(流量或闸门)进行求解,从而得到最优控制动作序列。相较于 PID控
制和 LQR控制,预测控制算法可以对未来一定时域内的响应进行预测,同时采用有限时域的目标函数
进行动作变量求解,得到可行解后提前执行控制动作,起到前馈加反馈的作用效果 [29] 。算法主要由预
测模型、目标函数、约束和滚动优化四部分组成。
其中开环最重要的部分是预测模型,使用最广泛的是 Schuurmans等 [30] 提出的积分延迟模型(Inte
grator - Delay ,ID),他对圣维南方程组在初始稳态附近进行线性化假设和拉氏变换,将单个渠池概化
为均匀流区和回水区 [31] ,其水力特性描述如下:
d 1
e(t) = [q(t - τ ) - q (t) - d(t)] (1)
i + 1
i
d t A
s
式中:e(t)为 t时刻下游水深相对于初始水深的增量,m;q(t - τ )为 t - τ 时刻渠池入流相对于初始入
i
3
3
流流量的增量,m ?s;q (t)为 t时刻渠池出流相对于初始出流流量的增量,m ?s;d(t)为 t时刻渠池
i + 1
3
2
分水口流量相对于初始分水口流量的增量,m ?s;A为回水面积,m ;τ 为滞后时间,s。
s
模型预测控制利用状态空间法来描述明渠系统的控制模型,通过求解目标函数,得到 k时刻的最
优控制序列。然而,在实际控制中,只有控制序列中的第一个控制动作被执行。在控制量被执行后,
系统会更新状态量,随后再基于状态量与目标值间的差异对下一时刻的控制动作进行优化求解,如此
循环往复,这个过程被称为 MPC的滚动优化 [32 - 33] 。
2.3 动态目标策略 对于南水北调中线这样的大型工程而言,入冬过渡期需要在短时间内减小流量至
平封流量,在采用固定目标水位时,需要耗费大量时间恢复至初始状态,延长滚动优化进程。由于冬
季输水时间通常仅 3个月,这段时间内可以不必保持常规的目标水位,而是根据进出口流量实时计算
新的目标水位值,实现间接控制蓄量运行,以此提高过渡期的切换效率。冰期结束后再逐步调整至常
规运行的目标水位值,保证工程安全运行。这种控制蓄量与下游常水位运行结合的方式,可以在流量
大幅调整阶段将蓄量分配至每个渠池,从而加速入冬过渡期的稳定。
MPC的目标函数通常是预测范围内的系统输出误差和控制范围内的未来控制动作的平方和,在明
渠系统中,其控制目标形式如下:
N p m
2
∑ ∑
J = ( (Q (e(k+jk)-e (k+jk))) + ∑ (R u(k+j -1 k)) 2 ) (2)
i.j i
r,i
i
i,j
i =1 j =1 j =1
式中:e(k + jk)为在第 k步预测未来第 k + j步第 i个渠池水位与目标水位的偏差值,m;e (k + jk)为
i r,i
— 2 9 9 —